Betaflight飞控完全指南
最详尽的技术参考手册 | 超过20万字的技术文档
序言:Betaflight与FPV飞行的革命
FPV竞速无人机 — Betaflight 的核心应用领域
在过去的十年间,无人机技术经历了前所未有的快速发展,其中FPV(First Person View,第一人称视角)飞行已经从一项小众的爱好者活动发展成为价值数十亿美元的全球性产业。在这场技术革命中,飞行控制器作为无人机的"大脑",其重要性不言而喻。而在众多开源飞控软件中,Betaflight无疑是最具影响力的存在,它不仅重新定义了竞速无人机的性能标准,更为全球数百万FPV爱好者提供了稳定、高效、免费的飞行控制解决方案。
Betaflight的成功并非偶然,而是技术、社区和市场需求完美结合的产物。作为一个完全开源的项目,Betaflight汇聚了来自全球数千名开发者和爱好者的智慧。从最初的一个小小分支(fork),到如今成为FPV竞速领域的事实标准,Betaflight的每一步发展都凝聚着社区的共同努力。这种开放协作的模式使得Betaflight能够快速迭代,不断引入创新功能,始终保持在技术前沿。
本报告旨在为读者提供一份关于Betaflight的全面、深入的技术参考手册。无论您是刚刚入门的新手,还是希望深入了解飞控原理的高级用户,本报告都将为您提供有价值的参考信息。报告涵盖了Betaflight的历史渊源、技术架构、核心功能、配置方法、调参技巧、故障诊断等各个方面,力求以详实的内容满足不同层次读者的需求。
值得强调的是,FPV飞行是一项需要高度责任感的活动。在享受Betaflight带来的卓越飞行体验的同时,我们始终要将安全放在首位。正确理解和运用飞控的各项功能,不仅能够提升飞行表现,更是保障人身和财产安全的基础。希望本报告能够帮助您更好地掌握Betaflight,享受安全、愉悦的FPV飞行。
第一章:Betaflight简介与发展历史
Betaflight Configurator 主界面 — 飞控配置的入口
1.1 什么是Betaflight
Betaflight是一个专为多旋翼无人机设计的开源飞行控制器软件,其核心功能是作为飞控系统的大脑,负责接收传感器数据、计算飞行姿态、输出电机控制信号,从而实现对无人机的稳定控制。作为现代消费级无人机领域最受欢迎的飞控软件之一,Betaflight以其卓越的飞行性能、丰富的功能和活跃的社区支持而闻名于无人机爱好者群体中。在全球数百万无人机飞手的选择中,Betaflight已经成为FPV竞速和Freestyle领域的事实标准。
Betaflight的核心设计理念是提供高性能、高可靠性的飞行控制体验,同时保持开源透明的开发模式。这意味着任何人都可以查看、修改和分发其源代码,这种开放性使得Betaflight能够快速迭代发展,吸收全球开发者爱好者的智慧。Betaflight最初基于Cleanflight项目开发,后来独立发展成为功能更加强大的飞控软件体系,目前由一个专门的开发团队维护,并得到了全球无数无人机爱好者的贡献。项目的源代码托管在GitHub上,采用GPLv3开源许可证,确保了项目的持续开放性。
从技术角度来看,Betaflight运行在基于ARM Cortex-M系列处理器的飞行控制器硬件上,利用实时操作系统(RTOS)来确保飞控任务的确定性和实时性。软件架构设计精巧,包含了传感器数据采集、姿态解算、PID控制、电机混控、飞行模式管理、OSD显示等众多模块,每个模块都经过精心优化以实现最佳的飞行表现。Betaflight能够支持从入门级的STM32F1处理器到旗舰级的STM32H7处理器的各种飞控硬件,为不同需求的用户提供合适的选择。
1.2 Betaflight的发展历程

Betaflight版本演进时间线 — 从2014年创建到BFOS的发展历程
Betaflight的故事始于2013年,当时无人机竞速(FPV Racing)运动开始在欧美地区兴起。这项新兴的运动迅速吸引了大量技术爱好者的关注,他们渴望获得比传统航拍无人机更敏捷、更快速的飞行体验。然而,最初的飞控软件选择非常有限,Baseflight和Cleanflight是当时最流行的两个选择。这些软件虽然能够满足基本的飞行需求,但在面对竞速飞行对性能和响应速度的苛刻要求时,逐渐显现出局限性。它们无法提供足够的控制精度和响应速度来满足专业竞速飞手的需求。
2014年,Betaflight项目正式成立,其创始人希望创建一个专门针对竞速飞行优化的飞控固件。项目名称中的"Beta"反映了其作为测试版软件的定位,而"flight"则直接表明了其用途。Betaflight在成立之初就采用了与Cleanflight不同的开发策略,更加注重性能优化和功能创新。这种专注于竞速性能的设计理念,使得Betaflight很快就在竞速飞手群体中获得了关注。与其他飞控项目相比,Betaflight更加激进地引入新技术和新功能,即使这些功能可能还不够成熟。
2015年是Betaflight发展史上的重要一年,项目发布了3.0版本,引入了多项革命性的功能,包括更先进的PID算法、优化的滤波器设置和更好的响应特性。这一版本奠定了Betaflight在竞速飞控领域的领先地位,吸引了大量专业飞手转向使用Betaflight。3.0版本还引入了更精细的滤波器控制,允许用户根据具体飞机配置调整滤波参数。这一改变使得每个飞手都能根据自己的飞机特性进行优化配置,大幅提升了飞行体验。
2016年,Betaflight继续快速发展,发布了4.0版本,增加了3D刷写率支持(允许电机反转)、更好的OSD功能和改进了失控保护机制。同年,Betaflight开始支持更多的飞控硬件平台,包括一些基于F3和F4处理器的boards。3D刷写率支持的引入是一个重要的里程碑,它允许飞机进行倒飞等特技动作,极大地扩展了飞行的可能性。这一功能对于Freestyle飞行尤为重要,因为它允许飞手执行各种复杂的特技动作。
2017年至2018年间,Betaflight进入了快速发展期,5.0和6.0版本带来了众多新特性。RPM滤波器(RPM Filter)的引入是这一时期最重要的技术创新之一,这是一种基于电机转速信息的主动噪声抑制技术,能够有效滤除电机干扰,大幅提升飞行稳定性。RPM滤波器利用电调返回的电机转速信息,精确识别电机振动频率并创建针对性的陷波滤波器来消除这些特定频率的噪声。这一技术的引入彻底改变了竞速飞控的游戏规则,使得飞机在各种飞行条件下都能保持稳定。同时,动态滤波器(Dynamic Filter)也在这时加入,进一步增强了噪声处理能力。
2019年,Betaflight发布了7.0版本,引入了FF(Feed Forward)前馈算法,这一技术显著提升了飞行的响应速度和精准度,使飞手能够更精确地控制飞机。FF算法的加入标志着Betaflight在竞速性能方面的又一次重大突破。前馈控制能够根据飞手的输入直接产生相应的控制输出,减少了仅依赖PID时不可避免的延迟。这使得飞机在竞速飞行中能够更加"跟手",飞手的每一个操作都能得到即时的响应。
2020年及以后,Betaflight继续演进,8.0、9.0和10.0版本带来了更多的优化和新功能,包括更好的D-Term设置、更精细的滤波器控制、改进的OSD界面等。同时,Betaflight也开始支持更多新型处理器架构和硬件平台。10.0版本是一个重要的里程碑,引入了更先进的滤波器算法、改进的OSD渲染引擎、更好的ELRS支持等。这一版本代表了Betaflight的成熟和完善,为未来的发展奠定了坚实的基础。
1.3 Betaflight的核心设计哲学
Betaflight的开发团队始终遵循着几个核心设计原则,这些原则贯穿于软件的各个方面,指导着每一个功能的设计和实现。理解这些原则有助于更好地理解Betaflight的行为方式和优化方向,从而更好地使用这个强大的飞控软件。这些原则不是一成不变的教条,而是在长期开发实践中总结出来的经验结晶。

Betaflight核心设计哲学 — 贯穿软件始终的四大设计原则
首先是性能优先原则。Betaflight的设计始终将飞行性能放在第一位,这意味着在面对功能和性能之间的权衡时,往往会选择牺牲一定功能复杂性来换取更高的执行效率。对于竞速无人机而言,每一毫秒的延迟都可能影响比赛结果,因此这种设计理念显得尤为重要。这种理念体现在代码的各个方面:从任务调度到算法实现,从内存管理到中断处理,每一个细节都经过精心优化以确保最佳性能。
其次是开放协作原则。作为开源项目,Betaflight欢迎全球开发者参与贡献代码、报告问题、提出改进建议。项目的GitHub仓库是开放的,任何人都可以提交Pull Request来贡献新功能或修复bug。这种开放模式使得Betaflight能够快速吸收社区的智慧和创意。项目有一个专门的开发团队负责核心开发,但同时也非常重视社区贡献。许多重要的功能都是由社区成员首先提出并实现的。
第三是用户友好原则。尽管Betaflight是一个技术复杂的软件,但其开发团队一直致力于降低使用门槛。通过Configurator图形配置工具,用户可以在不需要深入了解底层技术的情况下完成飞控设置。同时,CLI(命令行接口)则为高级用户提供了精细控制的能力。这种分层的设计使得Betaflight能够同时满足新手和专业用户的需求。新手可以通过图形界面快速上手,而高级用户可以通过CLI进行精细调优。
第四是持续迭代原则。Betaflight保持着活跃的开发节奏,定期发布新版本,每个版本都会带来性能改进、新功能或bug修复。用户可以通过Configurator方便地更新固件,这种持续改进的模式确保了软件始终保持着最佳状态。开发团队遵循语义化版本号规范,主版本号的变更意味着重大功能变更或架构调整。
1.4 Betaflight的主要特性
Betaflight拥有众多独特的功能特性,这些特性共同构成了其卓越的飞行性能表现。下面我们将详细介绍一些最重要的特性,每一个特性都经过了精心的设计和优化,以确保能够满足各种飞行场景的需求。

Betaflight核心特性总览 — 七大特性共同铸就卓越飞行性能
高性能PID控制器:Betaflight的PID控制器经过精心调校,能够提供卓越的稳定性响应平衡。PID算法包含了P(比例)、I(积分)、D(微分)三个控制参数,用户可以根据飞行风格和飞机特性进行调整。此外,FF(Feed Forward)前馈算法的加入进一步提升了响应速度。PID控制器采用串级结构,外环控制角度,内环控制角速度,这种设计能够提供更好的动态响应和稳定性。
先进的滤波器系统:Betaflight配备了一套完整的滤波器系统,包括硬件滤波器(Gyro硬件滤波)、软件滤波(PT1、BIQUAD滤波器)、RPM滤波器和动态滤波器。这些滤波器协同工作,能够有效抑制电机振动和机架共振带来的噪声,提供干净的传感器数据给PID控制器。滤波器系统是Betaflight最复杂也是最强大的功能之一,它能够适应各种不同的飞机配置和飞行条件。
丰富的飞行模式:Betaflight支持多种飞行模式,包括Angle模式(自稳模式)、Horizon模式(半自稳模式)、Acro模式(手动模式)、以及各种辅助模式如AltHold(定高)、PosHold(定点)等。每种模式都有其特定的应用场景,从入门学习到专业竞速,用户可以根据自己的技能水平和飞行需求选择合适的模式。
强大的OSD系统:On-Screen Display(OSD)功能允许在视频画面上叠加飞行信息,如电池电压、电流、飞行时间、高度、速度、RSSI等。Betalight的OSD系统高度可定制,用户可以自由调整显示内容和位置。OSD系统支持多种元素和布局,用户可以根据个人偏好和飞行需求进行配置。
高刷新率电机输出:Betaflight支持4KHz甚至更高的电机刷新率,这意味着电机控制信号的更新更加频繁,能够提供更平滑的响应和更低的延迟。对于竞速飞行而言,高刷新率直接关系到操控的精准性。更高的刷新率意味着控制循环能够以更短的间隔执行,从而提供更精确的控制。
黑盒记录功能:Betalight内置黑盒记录功能,可以将飞行数据记录到飞控板的闪存或外部SD卡中。这些数据可以用于事后分析,帮助用户诊断飞行问题或优化飞行性能。黑盒数据包括陀螺仪数据、PID输出、电机输出、RC输入等详细信息,是调试和优化飞行性能的强大工具。
完善的失控保护:Betalight提供了多层次的失控保护机制,包括信号丢失检测、自动返航、降落等功能,确保无人机在失去遥控信号时能够安全处置。失控保护是飞行安全的重要保障,正确配置失控保护可以最大程度地减少因信号丢失导致的损失。
第二章:开源飞控生态概述
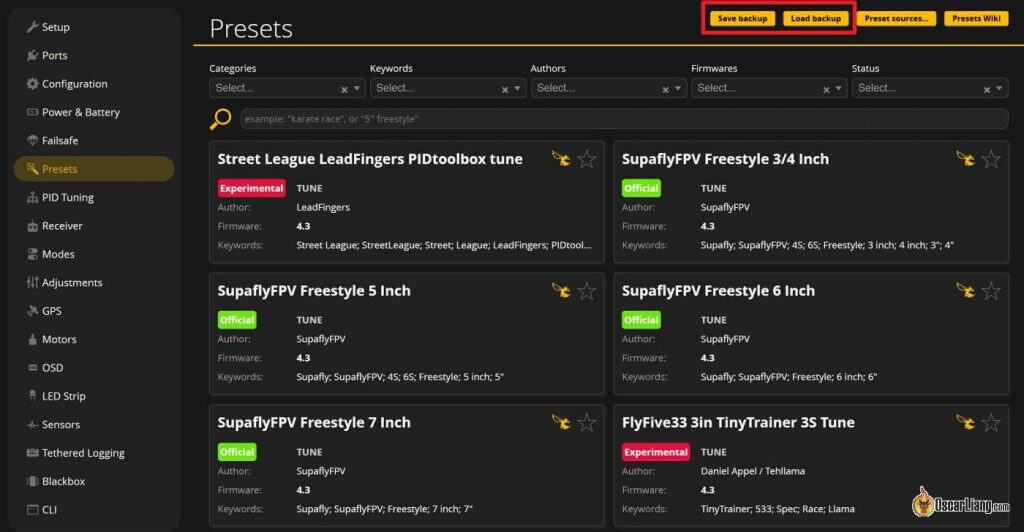
Betaflight Presets 预设界面 — 社区生态共享的配置方案
2.1 开源飞控的发展背景
开源飞控技术的发展可以追溯到21世纪初期,当时的无人机技术还处于萌芽阶段。随着微电子技术和嵌入式系统的快速发展,普通的消费级微控制器已经具备处理飞行控制所需计算的能力,这为开源飞控的出现奠定了技术基础。早期的无人机研究主要局限于学术机构和专业公司,高昂的成本和复杂的技术门槛限制了普通爱好者参与的可能性。然而,开源运动的兴起改变了这一局面。
在Betaflight诞生之前,已经存在几个重要的开源飞控项目。ArduPilot是最早的开源无人机项目之一,最初于2007年发布,主要面向固定翼和直升机。ArduPilot以其强大的功能和广泛的硬件支持而闻名,至今仍是开源无人机领域最重要的项目之一。MultiWii是另一个早期重要项目,它利用Wii游戏手柄的体感传感器来获取陀螺仪数据,因此得名。MultiWii虽然性能有限,但它是第一个让普通爱好者能够自己组装无人机飞控系统的项目。
Baseflight是这些早期项目的直接继承者,它基于MultiWii的代码库开发,专注于多旋翼无人机。Baseflight首次引入了基于STM32处理器的硬件支持,大大提升了计算性能和扩展性。STM32处理器基于ARM Cortex-M架构,提供了比早期8位处理器更强大的计算能力。然而,Baseflight的开发后来逐渐停滞,这直接催生了Cleanflight和后来的Betaflight的出现。Baseflight的开发者timecop后来将注意力转移到其他项目,导致Baseflight缺乏必要的维护和更新。
2.2 开源飞控的优势
选择开源飞控而非商业闭源飞控,用户可以获得多方面的优势。这些优势使得开源飞控成为越来越多无人机爱好者和专业人士的首选。开源模式不仅改变了无人机行业的技术发展轨迹,也为用户提供了前所未有的灵活性和控制权。
首先是透明性,用户可以查看和审计源代码,了解飞控的每一个细节,这对于安全关键的应用尤为重要。开源代码接受社区的广泛审查,bug和安全隐患更容易被发现和修复。这种透明性意味着用户不需要依赖制造商来解决所有问题,有能力的技术人员可以自己分析和解决问题。在无人机领域,安全性至关重要,开源模式允许更多专业人士参与安全审查。
其次是灵活性,开源飞控允许用户根据自己的需求进行定制修改。无论是添加新功能、优化特定飞行场景的性能,还是适配新型硬件,用户都有充分的自由度。这种灵活性是闭源软件无法提供的。用户可以根据自己的具体需求对飞控进行定制,而不必等待制造商提供更新。
第三是社区支持,活跃的开源项目通常拥有热情的用户社区,用户可以在社区中获取帮助、分享经验、参与讨论。这种社区驱动的支持模式往往比商业软件的客服支持更加有效和及时。在Betaflight的社区中,有经验丰富的开发者和高水平飞手愿意帮助新手解决问题。社区还贡献了大量的教程、调参指南和配置文件。
第四是成本效益,开源飞控通常是免费使用的,没有许可费用。这对于预算有限的爱好者来说是一个重要优势。同时,由于竞争激烈,各开源飞控项目都在不断提升性能,形成了良性发展态势。开源飞控的普及也推动了相关硬件价格的下降,使更多人能够参与到FPV飞行中来。
第五是持续性,开源项目的代码掌握在社区手中,不会因为某家公司的商业决策而停止开发。即使原始开发者不再维护,社区也可以继续fork项目确保其持续发展。这种去中心化的开发模式确保了技术的长期生存能力,即使面临商业压力或技术变革。
2.3 主流开源飞控项目介绍
目前主流的开源多旋翼飞控项目主要有三个:Betaflight、INAV和EmuFlight。每个项目都有其特定的设计目标和适用场景。了解这些项目的特点和适用场景,有助于用户选择最适合自己需求的飞控固件。
Betaflight:目前最流行的竞速和freestyle飞控固件,专注于提供最纯粹的飞行性能和最低的延迟。其开发团队活跃,新功能更新频繁,是竞赛级飞手的首选。Betaflight在竞速和Freestyle领域拥有压倒性的市场份额,其优化策略完全围绕这两个使用场景展开。
INAV:侧重于自主飞行功能,如航点导航、自动起飞降落等。INAV的目标用户是那些需要执行自主飞行任务的用户,如测绘、物流等应用场景。INAV源自Baseflight,但走出了一条完全不同的发展道路,增加了大量自主飞行相关的功能。
EmuFlight:是一个相对较新的项目,专注于提供终极的飞行性能和丰富的调参选项。EmuFlight在某些特定场景下可能提供更好的性能,但也需要更多的调参经验。EmuFlight fork自Betaflight,在其基础上进行了更多的优化和实验性功能的尝试。
第三章:Betaflight与Cleanflight、INAV的关系

开源飞控分支演化图 — Betaflight/Cleanflight/INAV/EmuFlight的派生关系
3.1 历史渊源
要理解Betaflight与Cleanflight、INAV之间的关系,需要追溯它们共同的代码祖先——Baseflight。Baseflight是由timecop于2012年创建的开源飞控项目,它是第一个真正为多旋翼竞速设计的飞控软件。Baseflight基于早期MultiWii的代码,移植到了更现代的STM32F1处理器平台上,并进行了大量优化。Baseflight引入了许多创新功能,包括更快的控制循环、更精细的参数调整等,这些特性使其成为当时竞速飞手的首选。
2013年,Cleanflight项目从Baseflight fork出来,由Dominic Clifton创建。Cleanflight的主要目标是为代码库带来更好的代码质量、文档和可维护性。Cleanflight引入了更清晰的代码结构、更好的配置系统,并开始支持更多的硬件平台。尽管来自同一个祖先,但Cleanflight和Baseflight走向了不同的发展方向。Cleanflight更加注重代码质量和可维护性,而不仅仅是性能优化。
2014年,Betaflight从Cleanflight fork出来,最初由Sashuk创建,后来由一个开发团队共同维护。Betaflight的创建动机是希望有一个专门针对竞速优化的版本,能够实现更低的延迟和更好的性能。从一开始,Betaflight就采取了更加激进的功能开发策略,不断引入新技术以提升飞行表现。这种策略使得Betaflight能够快速迭代,在竞速性能方面取得领先地位。
同年,INAV也从Baseflight fork出来,专注于自主飞行功能。INAV的开发者认为Baseflight的代码库更适合发展为功能性飞行控制器,而不是追求极致竞速性能。INAV增加了导航、航点飞行等功能,成为执行自主任务的首选。INAV fork的时机稍晚于Betaflight和Cleanflight,但其发展方向与其他两个项目完全不同。
3.2 技术差异对比
虽然Betaflight、Cleanflight和INAV有着共同的祖先,但它们现在的功能特性和设计目标差异显著。了解这些差异有助于用户选择最适合自己需求的飞控固件。以下是三个项目的主要特性对比:
| 特性 | Betaflight | Cleanflight | INAV |
|---|---|---|---|
| 主要用途 | 竞速、Freestyle | 通用多旋翼 | 自主飞行、测绘 |
| 更新频率 | 非常活跃 | 较低 | 活跃 |
| PID调优 | 高级、FF支持 | 基础 | 基础 |
| 滤波器 | RPM动态滤波器 | 基础滤波 | 基础滤波 |
| 导航功能 | 基础 | 基础 | 完整 |
| 目标用户 | 竞速飞手、FPV爱好者 | 休闲飞行 | 自主飞行爱好者 |
| 支持硬件 | 数百种 | 较少 | 中等 |
3.3 为什么选择Betaflight
对于大多数FPV竞速和Freestyle飞手来说,Betaflight是最佳选择,这背后有多个原因。首先是性能优势,Betaflight针对竞速场景进行了大量优化,提供了最低的延迟和最快的响应速度。这种性能优势在比赛中尤为关键,能够让飞手获得更好的操作手感。每毫秒的延迟改善都可能转化为赛道上的优势。
其次是功能丰富度,Betaflight拥有最丰富的飞行模式、滤镜选项和调参功能。无论你是初学者还是专业飞手,Betaflight都能提供足够的调整空间来优化飞行体验。从简单的自稳飞行到复杂的特技动作,Betaflight都能胜任。
第三是社区支持,Betaflight拥有最活跃的用户社区和开发者社区。在遇到问题时,用户可以在社区中快速获得帮助。同时,社区也贡献了大量的教程、调参指南和配置文件。新手可以轻松找到入门指南,高手可以深入研究高级功能。
第四是硬件兼容性,Betaflight支持市面上绝大多数主流飞控板,从入门级的F1处理器到旗舰级的F7、H7处理器都有良好支持。这种广泛的兼容性使得用户有更大的硬件选择空间。无论是购买成品飞控还是自己组装,用户都能找到合适的Betaflight兼容选项。
第四章:Betaflight版本演进
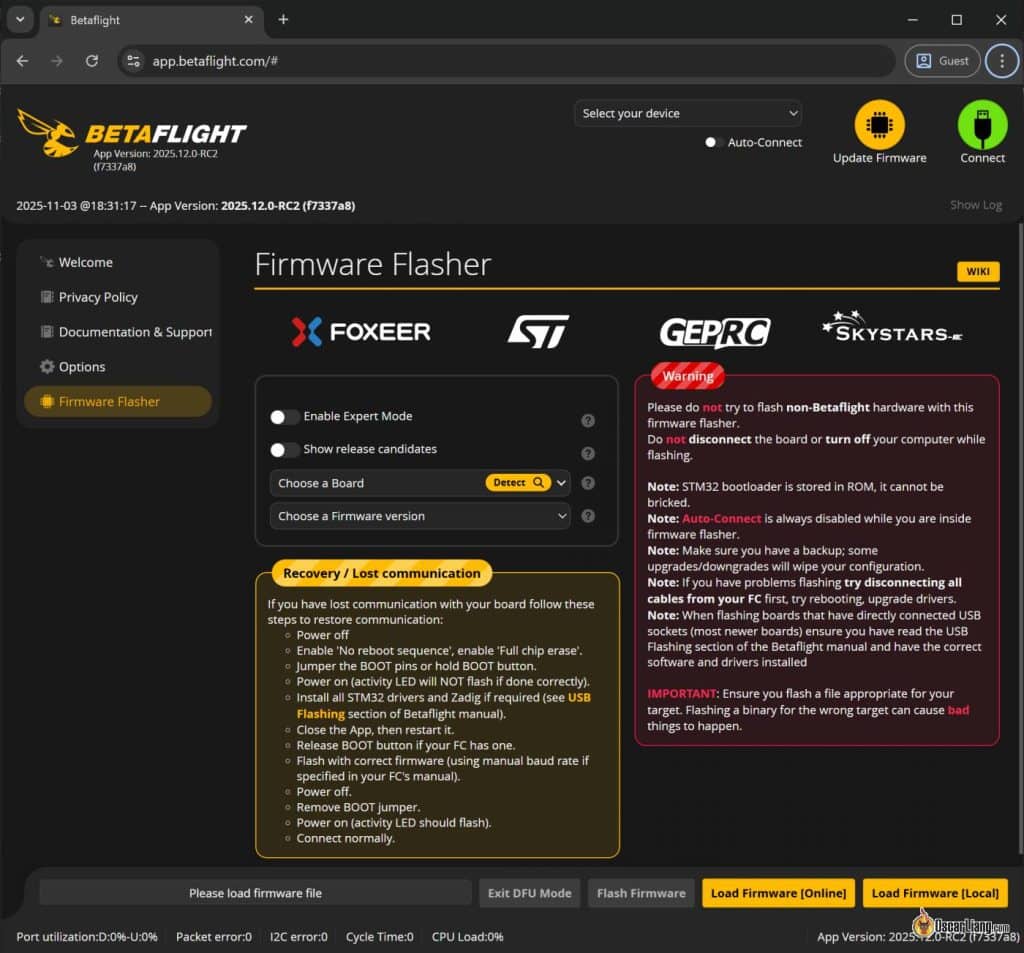
Betaflight Configurator 固件刷写界面 — 版本管理与更新
4.1 早期版本(1.x-3.x)
Betaflight的发展历程反映了飞控技术的演进。从1.x版本开始,Betaflight就确立了以性能为核心的设计理念。早期的Betaflight版本虽然在功能上相对简单,但已经展现出了优于同期其他飞控软件的性能表现。这些版本奠定了Betaflight的技术基础,为后续的快速发展做好了准备。
2.x系列是Betaflight真正开始受到关注的时期。这一时期,Betaflight引入了许多后来成为标配的功能,包括改进的PID算法、更精细的滤波器控制等。2.x版本的发布使得Betaflight开始成为竞速飞手的首选。2系列引入了更详细的调参选项,允许用户根据自己的飞行风格进行精细调整。
3.0版本是一个重要的里程碑。这一版本进行了大规模的重构,引入了更加模块化的代码结构,为后续功能开发奠定了基础。同时,3.x版本还增加了3D电机支持、改进的OSD系统等功能。3.0版本的重构使得代码更加清晰易懂,为吸引更多社区贡献者创造了条件。
4.2 快速发展期(4.x-6.x)
4.0版本带来了3D刷写率支持,这是竞速飞控的一个关键技术突破。3D刷inverted flight允许电机在飞行中反转,使飞机能够进行倒飞等特技动作。这一功能对于Freestyle飞行尤为重要,它打开了FPV飞行的新世界。3D飞行的实现需要电调和飞控的紧密配合,Betaflight在4.0版本中首次实现了这一功能。
5.0版本继续沿着性能优化的道路前进,增加了更多的滤波器选项和更好的失控保护机制。这一时期的Betaflight开始展现出相对于竞争对手的明显优势。5.0版本还引入了更多的遥测功能,使得飞行数据可以更方便地传输到地面。
6.0版本最重要的创新是引入了RPM滤波器(RPM Filter)。RPM滤波器是一种革命性的噪声抑制技术,它利用电机的实时转速信息来预测和消除电机振动带来的噪声。这一技术使得飞机在高速飞行时也能保持稳定,大幅提升了竞速飞行的表现。RPM滤波器的引入是Betaflight历史上最重要的功能更新之一,它解决了长期困扰竞速飞控的电机振动问题。
4.3 成熟期(7.x-10.x)
7.0版本引入了FF(Feed Forward)前馈算法,这是PID控制器的一个重要补充。FF算法能够根据飞手的输入直接产生相应的控制输出,减少了积分环节的延迟效应,使响应更加直接和精准。FF的引入标志着Betaflight的控制算法达到了新的高度。
8.0及后续版本继续在细节上进行优化,包括改进的D-Term设置、更智能的动态滤波器、更丰富的OSD元素等。这些改进虽然不如RPM滤波器那样具有革命性,但都在不断提升用户体验。8.0版本还改进了对新型硬件的支持。
10.0版本是Betaflight的里程碑版本,带来了大量的新功能和改进。包括更先进的滤波器算法、改进的OSD渲染引擎、更好的ELRS支持等。10.0版本代表了Betaflight的成熟和完善,各项功能都已经达到了很高的完成度。
第五章:Betaflight生态系统组成

Betaflight生态系统总览图 — 固件/Configurator/CLI/Presets/Blackbox/社区
5.1 核心组件
Betalight不仅仅是一个飞控固件,它是一个完整的生态系统,包含多个相互协作的组件。理解这些组件及其相互关系是掌握Betaflight的关键。这个生态系统包括了从软件开发工具到硬件配置工具的完整工具链。
Betaflight固件(Firmware):这是整个系统的核心,运行在飞控硬件上,负责所有的飞行控制功能。固件包含了传感器采集、姿态解算、PID控制、电机输出等核心模块。固件是飞控的"灵魂",决定了飞控的所有行为和性能特性。
Betaflight Configurator:这是官方提供的图形配置工具,用于配置飞控的各种参数。用户可以通过Configurator设置PID参数、配置飞行模式、调整滤波器参数等。Configurator支持Windows、macOS和Linux系统。Configurator提供了直观的图形界面,使得飞控配置变得更加简单。
CLI(命令行接口):除了图形界面,Betaflight还提供了CLI接口,允许用户直接输入命令来配置飞控。CLI提供了比图形界面更精细的控制能力,一些高级功能只能通过CLI进行配置。CLI是高级用户进行精细调优的主要方式。
5.2 配套硬件生态
Betalight的正常运行需要一系列配套硬件的支持。这些硬件包括飞控板本身、遥控接收机、视频发射机、摄像头、电池等。正确选择和配置这些硬件对于获得最佳飞行体验至关重要。
飞控板:Betalight支持数百种不同的飞控板,这些板子使用不同型号的处理器(STM32F1、F3、F4、F7、H7),具有不同的接口配置和功能特性。从入门级的36mm飞控到专业级的全尺寸飞控,Betaflight都有良好的支持。
遥控系统:Betalight支持多种遥控协议,包括传统PWM、SBUS、CRSF(ExpressLRS)、IBUS等。不同的接收机需要不同的配置方式。选择合适的遥控系统对于飞行体验至关重要。
图传系统:视频发射机(VTX)是FPV飞行的关键组件。Betalight支持多种VTX协议,可以通过飞控直接控制发射机的功率、频道等参数。VTX的智能控制使得用户可以通过OSD界面调整图传设置。
5.3 社区资源
Betalight拥有活跃的社区,用户可以在社区中获得帮助、分享经验。主要的社区资源包括官方论坛、Discord服务器、GitHub仓库等。这些社区资源是学习和解决问题的重要渠道。
官方文档:Betalight维护着详尽的官方文档,涵盖了从入门到高级的所有内容。文档托管在betaflight.com网站上,包括安装指南、配置教程、CLI参考等。
GitHub:所有的源代码、问题跟踪、功能请求都托管在GitHub上。高级用户可以直接查看源代码或参与开发。GitHub也是报告bug和请求新功能的主要渠道。
第六章:飞控硬件基础原理
STM32飞控板硬件 — 飞行控制系统的物理核心
6.1 飞行控制器的核心功能
飞行控制器是无人机的大脑,负责协调所有传感器和执行器的工作,实现稳定的飞行。理解飞控的工作原理对于更好地使用Betaflight至关重要。飞控的每个功能都经过精心设计,以确保在任何情况下都能提供可靠的控制。
飞行控制器的基本工作流程可以概括为:感知→计算→执行。首先,传感器采集无人机当前的状态信息,包括姿态角度、角速度、加速度、高度等。然后,中央处理器根据这些信息和预设的控制算法计算出需要施加到每个电机上的力。最后,通过电机输出通道将控制信号发送给电调,从而控制电机转速。这个过程需要以极高的精度和速度执行,以确保飞行的稳定性。
这个控制循环需要以极高的频率运行,通常每秒数千次。只有这样才能确保无人机在飞行过程中的稳定性和响应速度。任何延迟或计算错误都可能导致飞行不稳定甚至坠机。高性能的处理器和优化的算法是实现高频率控制循环的关键。
6.2 处理器架构
Betalight飞控使用的主要是STMicroelectronics(意法半导体)生产的STM32系列微控制器。这些处理器基于ARM Cortex-M架构,具有高性能、低功耗、实时性好的特点。ARM Cortex-M架构是嵌入式系统领域最流行的处理器架构之一,其设计专门针对实时应用进行了优化。
STM32F1系列:这是最早期的Betaflight飞控使用的处理器,基于Cortex-M3内核。虽然性能相对较低,但足以满足基本飞行控制的需求。目前仍有一些入门级飞控使用F1处理器,但新项目已经很少选择这个系列。
STM32F3系列:基于Cortex-M4内核,增加了DSP指令集和浮点运算单元,性能比F1系列有显著提升。F3处理器在竞速飞控中曾经非常流行,但现在已经被F4系列取代。
STM32F4系列:基于Cortex-M4F内核,主频更高(可达168MHz或180MHz),具有更大的内存和闪存。F4处理器是目前最主流的选择,兼顾了性能和成本。F4系列是目前支持最广泛的处理器系列。
STM32F7系列:基于Cortex-M7内核,性能进一步提升,主频可达216MHz或更高。F7处理器支持更多的外设和更大的内存,适合需要高级功能的用户。F7系列是高端飞控的常用选择。
STM32H7系列:目前最新的旗舰级处理器,基于Cortex-M7内核,主频可达480MHz。H7处理器提供了最强大的性能,适合专业竞赛和高要求应用。H7系列是目前性能最强的飞控处理器。
6.3 硬件接口
GPS定位模块 — 飞控的外接扩展设备
飞控板上有多种接口,用于连接各种外设。了解这些接口的功能和用法是正确接线的基础。不同的接口有不同的特性和用途,正确理解它们是配置飞控的前提。
UART接口:通用异步收发传输器,用于连接串行设备。常见的用途包括连接GPS模块、接收机、蓝牙模块等。UART是最常用的通信接口,几乎所有飞控都有多个UART接口。
I2C接口:集成电路总线,用于连接需要简单通信的传感器,如罗盘(磁力计)、某些气压计等。I2C总线允许连接多个设备,但通信速度相对较慢。
SPI接口:串行外设接口,用于高速数据传输。Betalight使用SPI接口连接SD卡(用于黑盒记录)、OSD芯片等高速设备。SPI接口的速度比UART和I2C都快得多。
PWM输出:脉冲宽度调制,用于控制电机转速。每个电机通道对应一个PWM输出,连接到对应的电调。PWM信号的频率和脉宽决定了电机的转速。
ADC输入:模数转换器,用于采集模拟信号,如电池电压、电流传感器输出等。ADC是实现电池监测功能的关键组件。
6.4 飞控板类型
市场上存在众多种类的Betaflight飞控板,它们在尺寸、接口、性能等方面各有不同。了解这些类型有助于选择合适的飞控。不同类型的飞控适用于不同的应用场景。
标准飞控:最常见的类型,集成陀螺仪和加速度计传感器,具有完整的电机输出和接口。尺寸通常为36x36mm或30.5x30.5mm。标准飞控是最灵活的选择,可以适配各种飞机配置。
整合飞控+电调:将飞控和电调整合在一起的All-in-One(AIO)板,体积小巧,适合小型穿越机。这类飞控通常将4个电调集成在板上。AIO飞控简化了安装,是入门的好选择。
独立电调飞控:飞控与电调分离,需要独立购买和安装。这种配置提供了更大的灵活性,但安装复杂度更高。独立电调方案适合追求最佳性能的用户。
第七章:支持的飞控板品牌和型号
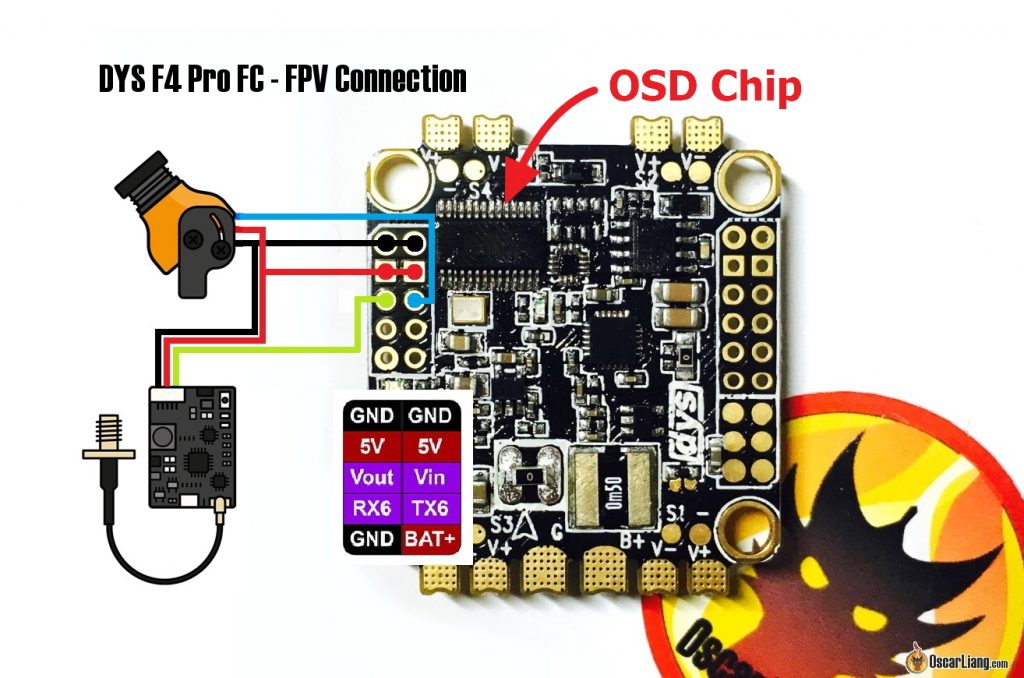
飞控板硬件特写 — STM32处理器与AT7456E OSD芯片
7.1 主流飞控板品牌
Betalight支持数百种飞控板,来自数十个不同的制造商。以下是一些最流行和最受信赖的品牌。每个品牌都有其独特的设计理念和产品特点,用户可以根据自己的需求和预算进行选择。
Holybro:来自美国的知名飞控制造商,产品以高质量和稳定性著称。Holybro的Kakute系列和Pixhawk系列在专业领域非常受欢迎。Holybro的飞控通常设计精良,支持丰富的外设接口。
Matek:中国制造商,提供性价比极高的飞控产品。Matek的F405和F722系列飞控在爱好者中广泛使用。Matek的产品价格实惠,性能可靠,是性价比用户的好选择。
IFlight:另一个中国品牌,以生产即插即用的整合方案著称。IFlight的飞控通常预装了最新版的Betaflight固件。IFlight的产品线非常丰富,从入门到高端都有覆盖。
SpeedyBee:新兴品牌,专注于提供易于使用的产品。他们的飞控通常具有良好的开箱即用体验。SpeedyBee在软件方面也投入很多,提供了配套的配置软件。
DJI Air Unit:虽然DJI的Air Unit主要是图传系统,但它也集成了飞控功能,可以直接运行Betaflight固件。DJI Air Unit为用户提供了一体化的FPV解决方案。
7.2 按处理器分类的飞控选择
| 处理器 | 推荐用途 | 代表产品 | 特点 |
|---|---|---|---|
| STM32F103 | 入门学习 | CC3D, Naze32 | 价格便宜,性能有限 |
| STM32F303 | 休闲飞行 | SP Racing F3, Kiss | 性能适中,兼容性好 |
| STM32F405 | 竞速首选 | Matek F405, IFlight F7 | 性价比高,主流选择 |
| STM32F722 | 高级竞速 | Holybro Kakute F7 | 性能强劲,功能丰富 |
| STM32H743 | 旗舰配置 | Matek H743, Crazybee | 最强性能,扩展性强 |
7.3 选购建议
选择飞控时需要考虑多个因素。首先是处理器性能,对于纯竞速飞行,建议选择F4或更高性能的处理器;对于休闲飞行,F3或F4足够使用。其次是传感器配置,陀螺仪的型号直接影响滤波效果,ICM系列陀螺仪是目前最好的选择。第三是接口数量,确保有足够的UART和其他接口连接所需的外设。第四是板尺寸,根据飞机尺寸选择合适大小的飞控。
除了硬件规格,还要考虑软件支持。选择有活跃开发和良好社区支持的飞控,可以确保固件更新和问题解决。有一些较老的飞控型号可能已经停止固件更新,选择时需要注意。
第八章:处理器架构详解

STM32飞控处理器系列对比 — F4/F7/H7处理器架构
8.1 ARM Cortex-M架构概述
ARM Cortex-M系列处理器是现代嵌入式系统的基石,它们为飞行控制器提供了所需的计算能力、实时响应和低功耗特性。理解处理器架构有助于更好地理解Betaflight的性能表现和优化方向。ARM架构在嵌入式领域有着广泛的应用,其设计专门针对实时系统进行了优化。
Cortex-M系列采用Harvard架构,意味着指令存储和数据存储使用独立的总线,允许同时进行取指和数据访问,从而提高处理效率。处理器内置了嵌套向量中断控制器(NVIC),能够以极低的延迟响应外部中断,这对于飞控这类时间关键系统至关重要。NVIC的中断优先级机制确保了关键任务能够及时处理。
8.2 处理器选型与性能
不同的STM32处理器型号具有不同的性能特点,选择合适的处理器需要综合考虑应用需求和预算。处理器的性能直接影响飞控的多个方面,包括控制循环频率、滤波器复杂度、黑盒记录能力等。
时钟频率:处理器的时钟频率直接影响指令执行速度。更高的频率意味着每秒可以执行更多的计算任务,但同时也会带来更高的功耗。对于复杂的滤波器算法和高刷新率要求,更高的时钟频率是必要的。然而,更高的频率也意味着更高的功耗和热量产生。
内存容量:RAM用于存储运行时数据,包括滤波器状态、PID累积值等。更大的RAM允许运行更复杂的算法或记录更多的黑盒数据。Flash用于存储固件代码和配置数据,更大的Flash可以容纳更多功能。内存不足会限制滤波器的复杂度和黑盒记录的时间长度。
数学运算单元:F4及以上的处理器集成了浮点运算单元(FPU),能够大幅加速浮点数运算。由于飞控算法大量使用浮点数运算,FPU的存在对性能有显著影响。没有FPU的处理器在执行浮点运算时需要软件模拟,效率会低得多。
8.3 处理器与飞控性能的关系
处理器性能直接影响飞控的多个关键指标。PID控制循环的执行时间直接取决于处理器速度,高性能处理器能够以更短的周期完成控制计算,从而支持更高的控制频率。滤波器是计算密集型功能,更复杂的滤波器设置需要更强的处理器能力。黑盒记录的采样率和记录时长也受限于处理器性能和存储容量。
在实际使用中,处理器的实际性能还受到固件优化程度的影响。Betaflight的开发者持续优化代码,以充分发挥各种处理器的性能。即使是相同型号的处理器,在不同的固件版本下也可能表现出不同的性能。
第九章:传感器系统详解
MEMS陀螺仪/IMU传感器 — 飞控感知姿态的眼睛
9.1 陀螺仪(Gyroscope)
陀螺仪是飞控中最重要的传感器,用于测量无人机绕三个轴的角速度(roll滚转、pitch俯仰、yaw偏航)。陀螺仪的数据是姿态解算和控制的基础,其精度和响应速度直接影响飞行表现。陀螺仪能够检测无人机姿态的快速变化,是实现稳定飞行的关键。
现代飞控普遍使用MEMS(微机电系统)陀螺仪,这种传感器体积小、成本低、功耗低。常见的陀螺仪型号包括ICM20689、ICM20602、BMI270等,它们在噪声水平、动态范围和温度稳定性方面各有特点。选择合适的陀螺仪对飞行性能有重要影响。
陀螺仪的关键参数包括采样率(通常为8kHz或更高速率)、量程(常见为±2000°/s)和噪声密度。更高采样率的陀螺仪能够捕获更快速的姿态变化,有助于提高控制精度。高性能的陀螺仪能够提供更干净的数据,减少滤波器的负担。
9.2 加速度计(Accelerometer)
加速度计测量无人机三个轴上的线性加速度。在静止状态下,加速度计能够感知重力方向,从而确定无人机的绝对姿态(相对于水平面的倾斜角度)。加速度计在确定无人机相对于地面的绝对方向时起关键作用。
在自稳模式(Angle Mode)下,飞控主要依赖加速度计数据来维持水平姿态。加速度计还能用于检测碰撞和自由落体状态,触发相应的保护机制。加速度计在失控保护中也有应用,可以检测飞机是否发生碰撞。
加速度计的主要问题是容易受到振动干扰,因此需要与陀螺仪数据进行融合处理。Betaflight使用传感器融合算法,结合陀螺仪的高动态响应和加速度计的绝对姿态参考,得出准确可靠的姿态估计。传感器融合是获得准确姿态信息的关键技术。
9.3 磁力计(Magnetometer)
磁力计(也称罗盘)测量地球磁场方向,为无人机提供绝对航向参考。依靠磁力计,飞控能够确定无人机相对于北方的航向角,这对于保持直线飞行和航点导航非常重要。磁力计在GPS导航中起关键作用。
磁力计容易受到电机和电源线产生的电磁干扰。在多旋翼无人机上,磁力计通常需要校准以补偿硬磁和软磁干扰。校准过程中需要让无人机在各个方向上旋转,以建立一个完整的磁场干扰模型。正确的校准对于获得准确的航向信息至关重要。
9.4 气压计(Barometer)
气压计测量大气压力,根据压力变化计算高度。气压高度虽然受天气影响较大,但在短时间内的相对高度测量是相当准确的。气压计是实现定高飞行的关键传感器。
在定高模式(AltHold)下,气压计是主要的高度参考。飞控会持续监测气压变化,PID控制器根据设定高度与实际高度的差值来调整油门,保持稳定的高度。气压计的准确性直接影响定高飞行的稳定性。
气压计容易受到风扰和气流的影响,在高速飞行或气流复杂的环境中可能不够稳定。一些高级飞控采用气压计融合GPS或测距仪的数据来提高高度测量精度。多种传感器融合可以提供更可靠的高度信息。
9.5 传感器融合
单一的传感器都有其局限性,因此飞控需要融合多个传感器的数据,以获得最佳的姿态和位置估计。Betaflight使用扩展卡尔曼滤波(EKF)或其他融合算法来实现传感器融合。传感器融合是现代飞控的核心技术之一。
传感器融合的基本原理是:陀螺仪提供高动态响应但存在漂移,加速度计提供绝对参考但容易受振动干扰,磁力计提供航向参考但可能受电磁干扰。通过合理的加权融合,可以充分发挥各传感器的优势,获得准确可靠的姿态估计。融合算法需要考虑各传感器的噪声特性和动态响应。
第十章:电源管理系统
Betaflight 电源与电池配置界面 — 电压电流校准与报警设置
10.1 电源架构
多旋翼无人机的电源系统通常采用从电池到多个用电设备的分布式架构。电池(通常为锂聚合物电池)首先连接到电调,电调再为飞控、接收机、摄像头、图传等设备供电。合理的电源架构设计是保证飞行安全的基础。
飞控板通常具有内置的稳压电路,能够将输入电压(如11.1V-25.2V)稳定到5V或3.3V,供内部电路和外围设备使用。一些飞控还提供独立的BEC(电池消除器)输出,可以为舵机或其他设备供电。稳压电路的质量直接影响飞控的工作稳定性和可靠性。
10.2 电池监测
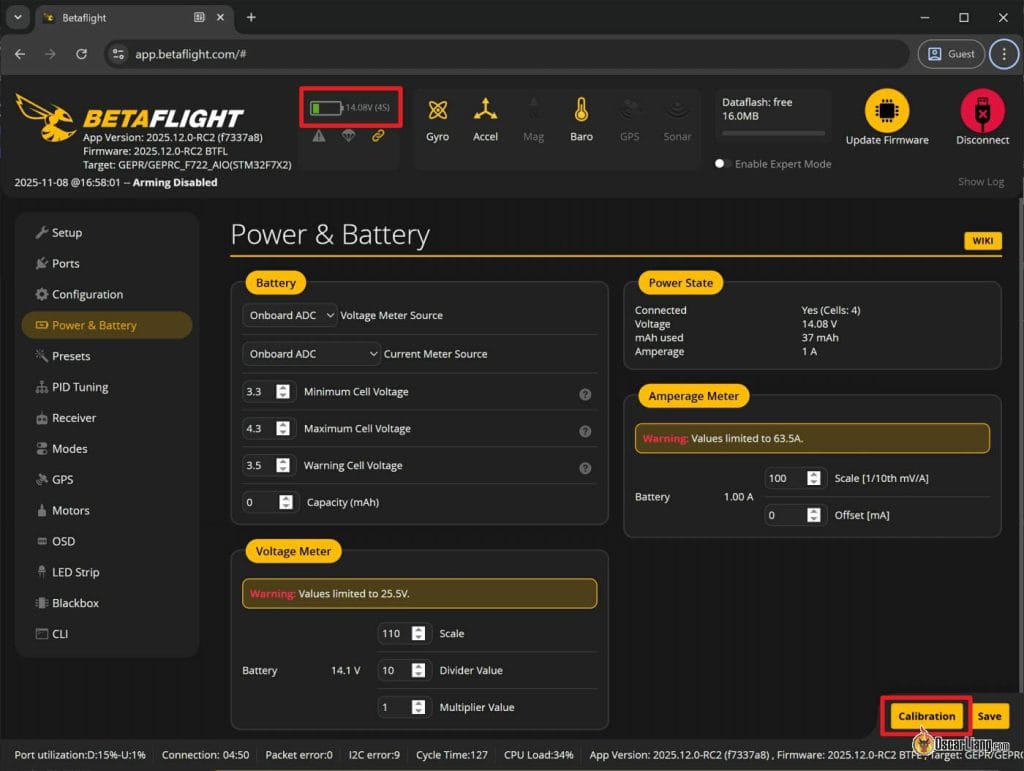
Betalight具备完善的电池监测功能,能够实时监控电池电压、电流和容量。这些信息通过OSD显示给飞手,帮助判断剩余飞行时间和电池状态。电池监测是安全飞行的重要保障。
电压监测:飞控通过ADC(模数转换器)读取电池电压。当电压低于设定阈值时,系统会发出低电压警告(BB响),提醒飞手返航。典型的低压警告阈值为3.3V-3.5V每节电芯。电压监测的准确性取决于ADC的精度和校准。
电流监测:连接电流传感器后,飞控可以实时监测用电电流。结合电压数据,可以计算出消耗的电量(mAh),从而更准确地估算剩余飞行时间。电流监测对于精确估算飞行时间非常重要。
10.3 电池保护
过度放电会永久损坏锂聚合物电池,因此低压保护功能非常重要。Betaflight提供多个级别的电池保护:警告级别(Warning)在电压较低时发出提醒;降级级别(LVC)会自动降低电机输出功率,限制飞行能力;关断级别则在电压过低时停止电机转动。多个级别的保护确保了电池的安全。
第十一章:通信接口详解

飞控通信接口总线图 — UART/SPI/I2C/USB接口详解
11.1 UART接口
UART(通用异步收发传输器)是飞控最常用的通信接口。每个UART可以连接一个串行设备,如GPS模块、接收机、蓝牙模块等。UART接口使用简单,是连接各种外设的首选。
在Betaflight中,每个UART需要单独配置其用途。常见的配置包括:Telemetry(遥测数据)、GPS、接收机信号等。不同的外设需要不同的波特率设置,如GPS通常使用115200波特,ELRS接收机使用115200或460800波特。正确的波特率设置是通信正常的前提。
飞控的CPU资源有限,UART数量也是有限的。在选择飞控时,需要计算所需的UART数量,确保有足够的接口连接所有外设。UART分配是飞控配置中的重要环节。
11.2 I2C接口
I2C(集成电路总线)是一种两线制的同步串行通信协议,允许多个设备共享同一总线。飞控上的I2C接口通常用于连接数字罗盘(磁力计)、某些类型的气压计或OLED显示屏。I2C接口的特点是只需两根信号线。
I2C总线的优点是只需要两根信号线(SCL时钟线和SDA数据线),可以连接多个设备。但其缺点是通信速度较慢,不适合高速数据传输。I2C适合连接对速度要求不高的传感器设备。
11.3 SPI接口
SPI(串行外设接口)是一种高速同步通信协议,用于连接需要快速数据传输的设备。在Betaflight飞控上,SPI接口主要用于连接SD卡(用于黑盒记录)和OSD(画面叠加)芯片。SPI是高速数据传输的首选接口。
SPI支持很高的通信速率,适合传输大量数据。SD卡的黑盒记录功能就需要使用SPI接口来达到足够的数据写入速度。SPI接口需要更多的信号线(通常4根),但速度远高于UART和I2C。
11.4 CAN总线
CAN(控制器局域网)总线是一种可靠的工业通信协议,在无人机领域正变得越来越重要。CAN总线支持连接多个节点(设备),并且具有优秀的错误检测和纠正能力。CAN总线最初用于汽车电子,其可靠性在无人机领域同样有价值。
在大型无人机上,CAN总线可以用于连接多个电调、传感器或其他设备,简化布线和提高系统可靠性。Betaflight现在开始支持CAN总线设备,未来可能会有更广泛的应用。CAN总线的普及将改变无人机的系统架构。
第十二章:Betaflight固件架构

Betaflight 固件四层架构图 — HAL→驱动→核心→应用
12.1 固件整体结构
Betalight固件采用模块化设计,将不同的功能划分为相对独立的模块。这种设计使得代码易于维护和扩展,同时也有助于理解和调试。模块化设计是大型软件项目的标准做法。
固件的主要模块包括:驱动层(Drivers)负责与硬件交互,包括传感器驱动、UART驱动、SPI驱动等;核心层(Core)实现飞行控制的核心算法,包括姿态解算、PID控制、混控等;应用层(Application)处理更高层次的功能,如飞行模式管理、OSD显示、黑盒记录等。分层架构使得代码结构清晰。
12.2 驱动程序
驱动程序是固件与硬件之间的抽象层,它们封装了硬件的操作细节,提供统一的接口供上层代码使用。驱动程序的设计直接影响固件的可移植性和可维护性。
陀螺仪驱动:负责与MEMS陀螺仪芯片通信,配置采样率、量程等参数,并读取原始数据。不同型号的陀螺仪需要不同的驱动程序。每种陀螺仪芯片都有其独特的通信协议。
电机驱动:生成PWM信号控制电调,进而控制电机转速。电机驱动需要精确的时序控制,以确保信号稳定可靠。电机驱动的精度直接影响飞行的控制精度。
通信驱动:UART、I2C、SPI等通信接口的驱动程序,负责数据的发送和接收。通信驱动需要处理各种通信协议和错误情况。
12.3 飞行控制核心
飞行控制核心是固件中最关键的部分,负责实现稳定飞行所需的所有算法。这些算法经过精心设计和优化,以确保最佳的飞行性能。
传感器采集:以固定的采样率读取陀螺仪、加速度计等传感器的原始数据。传感器采集的准确性和实时性直接影响控制效果。
姿态解算:利用传感器数据计算出无人机当前的姿态(roll、pitch、yaw角度和角速度)。姿态解算算法需要平衡精度和计算效率。
控制计算:PID控制器根据期望姿态与实际姿态的差值,计算出需要的控制量。控制计算是飞行性能的核心。
混控:将控制量按照特定算法分配到各个电机上,生成最终的电机控制信号。混控算法决定了多旋翼的操控特性。
12.4 配置管理
Betalight的设置存储在飞控的闪存中,包括PID参数、滤波器设置、飞行模式配置等。这些设置通过Configurator或CLI进行修改,掉电后会自动保存。配置管理系统使得用户可以方便地保存和恢复设置。
配置数据使用特殊的格式存储,能够在固件升级时自动迁移。用户也可以导出配置进行备份,或导入他人的配置作为参考。配置迁移功能大大方便了固件升级。
第十三章:实时操作系统与调度器

FreeRTOS任务调度时序图 — Gyro→PID→电机输出的循环周期
13.1 实时操作系统的必要性
飞行控制是一个时间关键的系统,需要在确定的时间内完成任务。实时操作系统(RTOS)能够保证任务在预定的时间内完成,这对于飞控至关重要。实时性是飞控操作系统的核心要求。
Betalight使用FreeRTOS作为其操作系统,这是一个广泛使用的开源RTOS。FreeRTOS提供了任务调度、信号量、队列等机制,使得固件能够以结构化的方式管理多个并发任务。FreeRTOS的代码量小,功能丰富,非常适合嵌入式系统。
13.2 任务调度
Betalight将不同的功能划分为多个任务,每个任务负责特定的工作。调度器根据任务的优先级和时间要求,决定何时运行哪个任务。任务调度的设计直接影响系统的实时性能。
最高优先级任务:电机输出任务需要在精确的时间点执行,以确保PWM信号的稳定。电机输出的时序要求非常高。
高优先级任务:传感器采集和姿态解算任务需要以高频率运行,提供最新的姿态数据。姿态数据是控制的基础。
中优先级任务:PID控制计算、黑盒记录等任务。中等优先级的任务对实时性要求相对较低。
低优先级任务:OSD更新、遥测数据发送等任务。低优先级任务可以等待更高优先级任务完成后再执行。
13.3 控制循环
飞控的核心是控制循环,这个循环以固定的频率重复执行。Betalight支持不同的控制循环频率,如1kHz、2kHz、4kHz甚至8kHz。控制循环频率是飞控性能的重要指标。
控制循环的频率直接影响飞行性能。更高的频率意味着更快的响应速度和更精细的控制,但同时也意味着处理器需要承担更多的计算任务。选择控制频率需要平衡性能和处理器能力。
选择控制频率需要平衡多个因素:处理器的计算能力、滤波器的复杂程度、所需的响应速度等。对于大多数竞速应用,4kHz是一个很好的平衡点。某些高性能飞控可以支持8kHz甚至更高的频率。
第十四章:飞行控制算法

飞行控制算法工作流 — 遥控输入→Rates→外环→内环PID→电机输出
14.1 控制理论基础
飞行控制的核心是自动控制理论的应用。控制系统通过测量系统的当前状态,与期望状态进行比较,然后根据误差产生控制动作,使系统状态趋向期望值。控制理论是飞控算法的基础。
对于无人机控制系统,我们需要控制的是无人机的姿态(滚转、俯仰、偏航)。控制的目标是让无人机的实际姿态跟随遥控器发出的指令。姿态控制是一个多变量、强耦合的系统。
14.2 串级控制
Betalight采用串级控制结构,即两个或多个控制环串联工作。内环控制角速度,外环控制角度。这种结构能够提供更好的动态响应和稳定性。串级控制是工程控制中的经典结构。
外环(角度环):将期望角度与实际角度比较,输出期望角速度。外环确定飞机的目标姿态。
内环(角速度环):将期望角速度与实际角速度比较,输出电机控制量。内环直接控制飞机的运动。
串级结构的优点是内环响应速度快,能够快速抑制扰动;外环负责精确的角度跟踪。这种结构被广泛应用于工业控制系统,也是飞控的标准设计。
14.3 控制算法的实现
在代码层面,控制算法的实现需要考虑效率和精度。Betaflight的控制算法经过精心优化,能够在有限的计算资源下实现最佳性能。算法优化是飞控开发的重要工作。
控制算法以固定的时间间隔执行,这个间隔由控制循环频率决定。每次执行时,算法会读取最新的传感器数据,计算误差,然后应用PID公式得到控制量。控制算法的执行时间必须小于控制周期。
第十五章:姿态解算与传感器融合

姿态解算与传感器融合流程图 — 陀螺仪+加速度计+磁力计→融合→输出
15.1 姿态表示
无人机在三维空间中的姿态可以用多种方式表示,最常用的是欧拉角和四元数。欧拉角直观易懂,包括滚转角(Roll)、俯仰角(Pitch)和偏航角(Yaw)。四元数则是数学上更优雅的表示,能够避免欧拉角的万向节锁问题。姿态表示是姿态解算的基础。
Betaflight内部使用四元数进行姿态计算,但在OSD显示和配置中通常使用欧拉角,因为欧拉角更直观易懂。四元数和欧拉角之间可以相互转换。Betaflight的内部处理使用四元数以避免万向节锁。
15.2 传感器融合算法
由于各种传感器都有其局限性,单一传感器无法提供准确可靠的姿态信息。传感器融合算法通过合理的加权组合多个传感器的数据,得出最佳的姿态估计。传感器融合是获得准确姿态信息的关键。
互补滤波:一种简单的融合方法,将陀螺仪的短期准确性和加速度计的长期稳定性结合起来。互补滤波计算量小,适合资源受限的系统。互补滤波是最基础的融合方法。
卡尔曼滤波:更复杂的融合方法,能够最优地估计系统状态。卡尔曼滤波考虑了各传感器的噪声特性,能够提供更准确的结果。卡尔曼滤波在导航系统中应用广泛。
四元数梯度下降:Betaflight使用的IMU融合算法,基于四元数的梯度下降法。这种方法结合了陀螺仪和加速度计的数据,能够快速收敛并保持稳定。这是Betaflight的默认融合算法。
15.3 传感器校准
传感器需要定期校准以确保测量准确。陀螺仪通常只需要在静止状态下进行零点校准;加速度计需要在多个方向上进行校准;磁力计需要做全面的360度旋转校准。传感器校准是获得准确数据的前提。
校准数据存储在飞控的EEPROM或闪存中,每次启动时自动加载。正确的校准对于飞行稳定性和导航精度至关重要。不准确的校准会导致飞行异常。
第十六章:电机输出与PWM系统
电机与螺旋桨 — 飞控系统的执行机构
16.1 PWM基础
PWM(脉冲宽度调制)是一种通过改变脉冲宽度来控制电机转速的技术。在电调控制中,PWM信号的高电平时间表示期望的转速,范围通常为1000μs(停止)到2000μs(满油门)。PWM是电机控制的基础技术。
PWM信号的频率也是重要的参数。传统上使用50Hz(20ms周期)的PWM信号,但在竞速飞控中,为了获得更快的响应速度,通常使用更高频率的信号,如400Hz(Oneshot125)或更高(Oneshot42、DShot)。更高的PWM频率意味着更快的响应。
16.2 DShot协议
Betaflight 电机配置界面 — DShot协议与电机测试
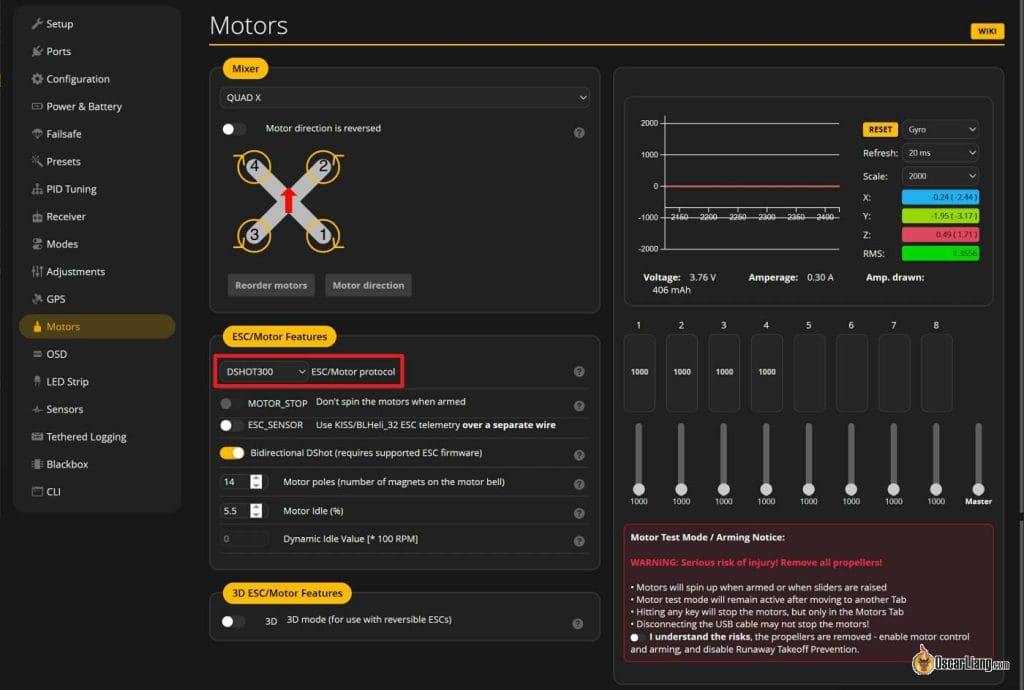
DShot是现代竞速飞控常用的数字电机控制协议,相比传统PWM具有多项优势。DShot信号是数字化的,能够双向通信,电调可以将电机转速信息传回飞控。DShot是电机控制的重要进步。
DShot150:基础版本,最高刷新率约32KHz。DShot150是最基本的DShot版本。
DShot300:中等速度版本,最高刷新率约64KHz。DShot300提供了速度和可靠性的平衡。
DShot600:高速版本,最高刷新率约128KHz,适合竞速飞行。DShot600是竞速的首选。
DShot还支持RPM Telemetry功能,通过电调回传的转速信息,Betaflight可以实现RPM滤波器等高级功能。RPM Telemetry是RPM滤波器的前提。
16.3 电机混控
不同类型的多旋翼需要不同的电机控制方式。四轴飞行器最常用的是X模式和+模式。电机混控算法负责将控制输入(滚转、俯仰、偏航、油门)转换为各个电机的具体转速。混控是多旋翼飞行的核心算法。
例如,在X模式下:前左电机和后右电机加速产生滚转力矩;前右电机和后左电机加速产生俯仰力矩;所有电机同向旋转的差异产生偏航力矩。混控算法的设计需要考虑电机的排列方式。
16.4 3D飞行支持
Betaflight支持3D飞行,即电机可以在飞行中反转。这使得飞机能够进行倒飞等特技动作。3D飞行需要电调支持双向通信(ESC Telemetry),并且在配置中启用3D功能。3D飞行是Freestyle飞行的重要功能。
第十七章:PID控制器深度解析

PID控制器串级结构图 — 外环角度控制→内环角速度PID→电机输出
17.1 PID控制器原理
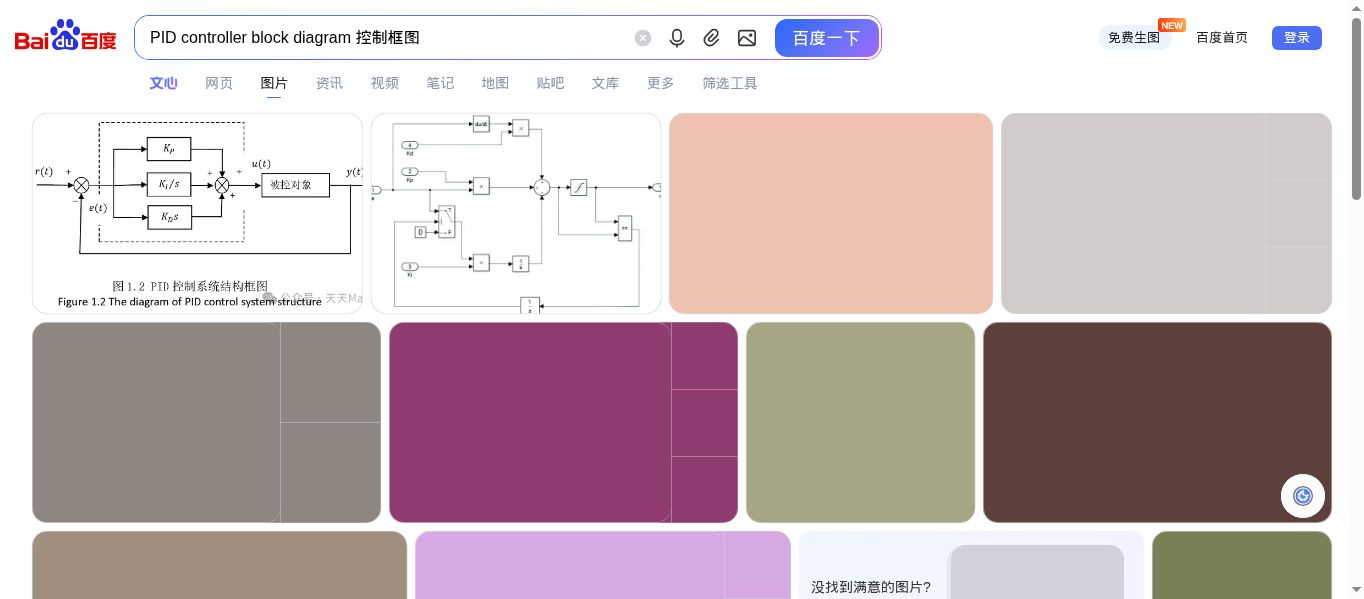
PID控制器是自动控制领域最经典的控制算法,其名称来源于三个控制分量:比例(Proportional)、积分(Integral)和微分(Derivative)。在飞控中,PID算法负责根据期望姿态与实际姿态的差值,计算出需要的电机控制量。PID是飞控的核心算法。
比例(P)控制:根据误差的大小产生控制输出。误差越大,P控制输出越大。P控制提供主要的控制力,但单独使用P控制会产生稳态误差(即永远无法完全消除的误差)。P是PID中最基本的部分。
积分(I)控制:对误差进行积分,累积历史误差。I控制能够消除稳态误差,使系统最终能够精确达到目标值。但I控制过大可能导致超调和振荡。I控制处理持续存在的误差。
微分(D)控制:根据误差的变化率产生控制输出。D控制能够预测误差的未来趋势,提前进行补偿,从而提高系统的动态响应和稳定性。D控制提供阻尼效果。
17.2 PID参数调整基础
PID控制器串级结构框图 — 飞控算法的核心
调整PID参数是让飞机获得最佳飞行表现的关键。正确的PID设置能够让飞机既稳定又响应灵敏;不正确的设置则可能导致振荡、抖动甚至失控。PID调参是飞控使用中最重要的技能之一。
P值调整:P值过低会导致飞机响应迟钝;P值过高会导致振荡和抖动。理想的P值应该让飞机在受到扰动后快速恢复,同时不会产生持续振荡。P值是调整的起点。
I值调整:I值主要影响飞机的姿态保持能力。低I值会导致飞机难以保持设定姿态(如风大时漂移);高I值会导致反应迟钝或产生慢速振荡。I值影响长期精度。
D值调整:D值提供阻尼效果,抑制过度修正。低D值会导致修正过度产生振荡;高D值会导致反应迟钝。D值应该是三个值中最小的。
17.3 Feed Forward(FF)前馈
FF(Feed Forward,前馈)是Betaflight 7.0引入的重要功能。FF算法能够根据飞手的输入直接产生相应的控制输出,减少了仅依赖PID时不可避免的延迟。FF显著提升了响应速度。
传统的PID控制是被动响应型的:只有当误差出现时才会产生控制动作。FF则主动根据输入指令产生控制力,使响应更加直接和快速。FF非常适合竞速飞行,因为它提供即时的响应。
FF特别适合竞速飞行,因为竞速飞手需要的是快速的响应,而不是完美的稳态精度。适当设置FF可以让飞机感觉更加"跟手"。FF是竞速飞行的重要参数。
17.4 I值和D值限制
为了防止PID参数设置不当导致的问题,Betaflight提供了I值和D值的限制功能。这些限制可以防止极端的参数设置造成灾难性的后果。限制功能保护飞机免受错误参数的影响。
I值限制(I_max):限制积分项的最大输出,防止积分饱和导致的过激反应。积分饱和会导致系统失控。
D值限制(D_max):限制微分项的最大输出,防止D值过大导致的噪声放大问题。噪声放大可能导致振荡。
17.5 TPA(Throttle PID Attenuation)
TPA功能允许在油门较高时自动降低PID控制强度。这是因为在高油门时,电机已经接近最大推力,进一步增加控制量也不会有效果,反而可能导致振荡。TPA在高油门时保护飞机。
TPA通常设置为在高油门(>1700)时开始降低PID强度,在最大油门时降低到一定的百分比。这个功能对于防止高油门时的振荡非常有效。TPA是高级调参功能。
17.6 角度限制
Betaflight允许限制飞机能够倾斜的最大角度。这对于防止用户在Angle或Horizon模式下将飞机翻转到危险角度很有帮助。角度限制保护新手避免危险操作。
角度限制不会影响Acro模式,在Acro模式下用户可以自由翻滚。角度限制仅在自稳模式下生效。Angle限制通常设置为45-90度。
第十八章:飞行模式详解
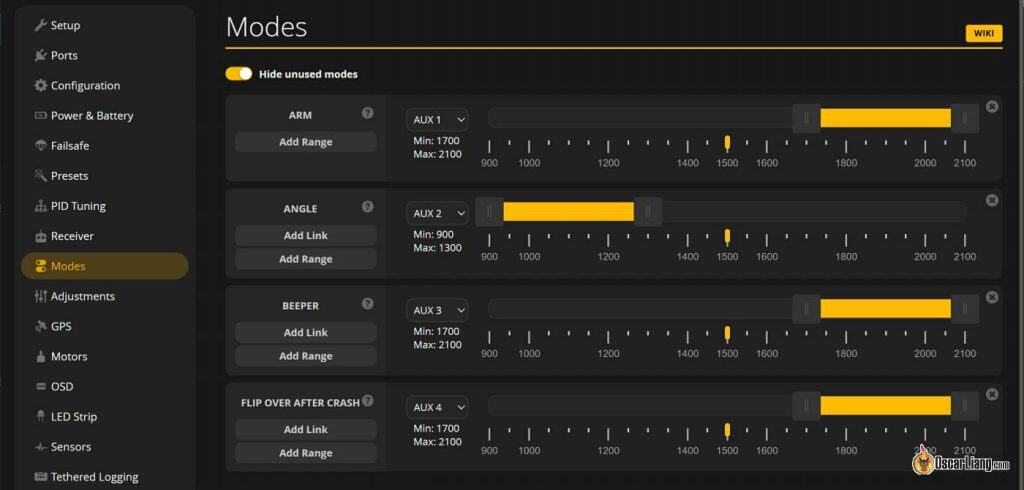
Betaflight Configurator 模式设置界面 — 飞行模式灵活配置
18.1 飞行模式概述
Betaflight 飞行模式配置界面 — 模式与通道分配
Betalight提供了多种飞行模式
飞行模式决定了当推杆或摇杆输入时,飞机的响应方式。了解各种模式的特点是安全飞行的基础。不同的飞行场景需要不同的飞行模式。
18.2 Acro模式(手动模式)
Acro模式是竞速和Freestyle飞行最常用的模式,也是最纯粹的飞行模式。在这个模式下,飞控不会自动稳定飞机,飞机完全跟随飞手的摇杆输入。Acro是专业飞手的选择。
摇杆的输入被转换为期望的角速度。例如,将滚转摇杆向右推,飞机就开始以一定的角速度向右滚转。松开摇杆,飞机保持当前的角速度继续滚转(不会自动回零)。Acro要求飞手有较强的控制能力。
Acro模式需要飞手具有一定的飞行经验,能够主动控制飞机的姿态。但这提供了最大的控制自由度和最直接的响应,是竞速比赛的标准模式。Acro是FPV竞速的默认模式。
18.3 Angle模式(自稳模式)
Angle模式是一种自稳模式,飞控会自动保持飞机水平。当飞手松开摇杆时,飞机会自动回正到水平姿态。Angle适合初学者入门。
在这个模式下,摇杆的输入被转换为期望的角度而非角速度。例如,将滚转摇杆向右推,飞机就会倾斜到对应的角度,然后保持这个角度而不是继续滚转。Angle模式提供自动稳定。
Angle模式适合新手入门,因为即使飞手完全松开摇杆,飞机也能保持稳定飞行,不会像Acro那样会一直滚转。Angle是学习飞行的最佳起点。
18.4 Horizon模式(半自稳模式)
Horizon模式是Angle和Acro的混合体。在摇杆输入较小时(低于设定阈值),表现为Angle模式,自动保持水平;在摇杆输入较大时,表现为Acro模式,允许自由翻滚。Horizon是过渡模式。
Horizon模式提供了一个平滑的过渡,让飞手可以在飞行中逐步从自稳过渡到手动。这个模式也是FPV竞速中常用的,因为它允许特技动作但在普通飞行时提供稳定保护。Horizon适合渐进学习。
18.5 Air模式
Air模式修改了电机输出的特性。在Air模式下,即使油门为0,电机也能响应滚转和俯仰输入。这意味着即使在悬停或低速飞行时,飞手也能进行姿态控制。Air确保低油门时的控制能力。
没有Air模式时,如果油门为0,电调可能会停止电机输出,导致飞机失去所有控制。Air模式确保了即使在低油门时也能保持控制能力。Air模式在3D飞行中必不可少。
Air模式在3D飞行和室内飞行中特别有用,因为在这些场景中经常需要在低油门甚至零油门时进行控制。Air是高级飞行的必备功能。
18.6 GPS模式
当连接GPS模块后,Betaflight支持更多的飞行模式。GPS模式使飞行更加自动化。
PosHold(定点模式):飞机利用GPS保持当前位置和高度,飞手只需控制高度变化。PosHold适合航拍。
AltHold(定高模式):飞机利用气压计保持当前高度,飞手可以自由控制水平位置。AltHold适合需要手动位置控制的场景。
Return to Home(返航模式):飞机自动飞回起飞点并降落。RTH是重要的安全功能。
Waypoint(航点模式):飞机按照预设的航点自动飞行(需要INAV固件)。Waypoint是高级功能。
18.7 其他辅助模式
Headless模式(无头模式):飞机的"前"方向始终跟随遥控器指示的方向,而不是飞机机头的实际方向。这使得飞手更容易控制飞机方向。Headless适合初学者。
Turtle模式(乌龟模式):如果飞机翻转到地面无法起飞,可以通过特殊操作让电机反向转动帮助飞机翻转到正确姿态。Turtle是实用的救援功能。
Paralyze模式(瘫痪模式):禁用所有电机输出,常用于紧急停止。Paralyze是安全功能。
第十九章:OSD系统详解
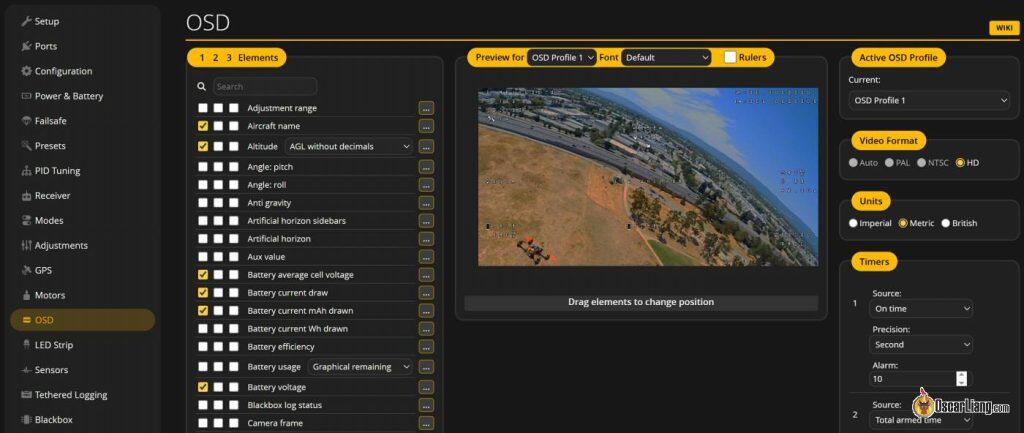
Betaflight OSD 配置界面 — 屏幕显示元素实时布局
19.1 OSD基础
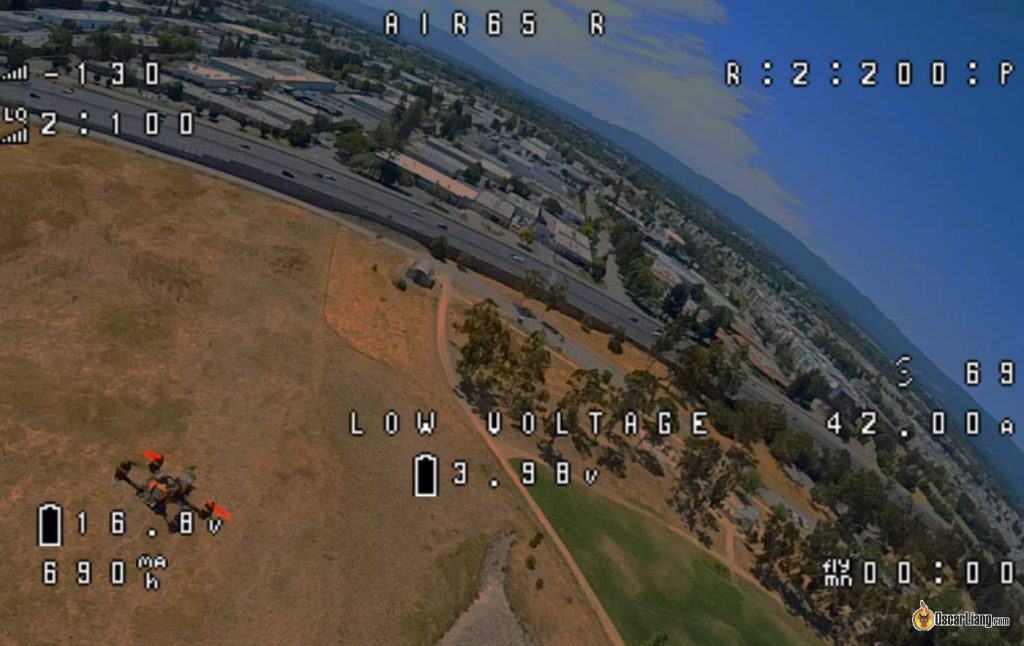
OSD(On-Screen Display,屏幕显示)是FPV飞行的重要组成部分。它将飞行信息叠加在视频画面上,让飞手能够实时了解飞行状态。OSD是FPV飞行的眼睛。
典型的OSD信息包括:电池电压、电流、消耗电量、飞行时间、高度、速度、距离、GPS坐标、飞行模式、RSSI(信号强度)等。这些信息对于安全飞行至关重要。OSD信息应该在飞行中持续监控。

FPV眼镜中的Betaflight OSD显示效果 — 实时飞行信息叠加
19.2 OSD硬件
OSD系统需要硬件支持,通常有两种实现方式。硬件选择影响OSD的功能和性能。
独立OSD芯片:传统的实现方式,使用独立的OSD芯片(如Maxim OSD)进行视频叠加。飞控通过串行接口向OSD芯片发送要显示的数据,OSD芯片将数据叠加到视频信号中。独立OSD需要额外的硬件。
集成OSD:现代飞控通常将OSD功能集成在主控芯片中,使用硬件视频编码器(如H7处理器的DCMI接口)直接处理视频。这种方式更加简洁,配置也更方便。集成OSD是现代飞控的趋势。
19.3 OSD元素配置
Betaflight OSD布局 — Freestyle飞行的OSD元素排列
Betalight的OSD系统非常灵活,用户可以自由选择显示哪些元素以及它们的位置。Configurator提供了可视化的OSD编辑器,可以直接在屏幕上拖拽元素到期望的位置。OSD配置是个性化的重要部分。
常见的OSD元素包括:
- 电池信息:电压、百分比、消耗mAh、警告阈值
- 飞行数据:高度、速度、距离、飞行时间
- 姿态信息:角度显示、人工地平线
- 遥控信息:RSSI、链路延迟、飞手信号
- GPS信息:坐标、卫星数量、HDOP
- 飞行模式:当前激活的飞行模式
- 警告信息:低电压警告、失控保护触发等
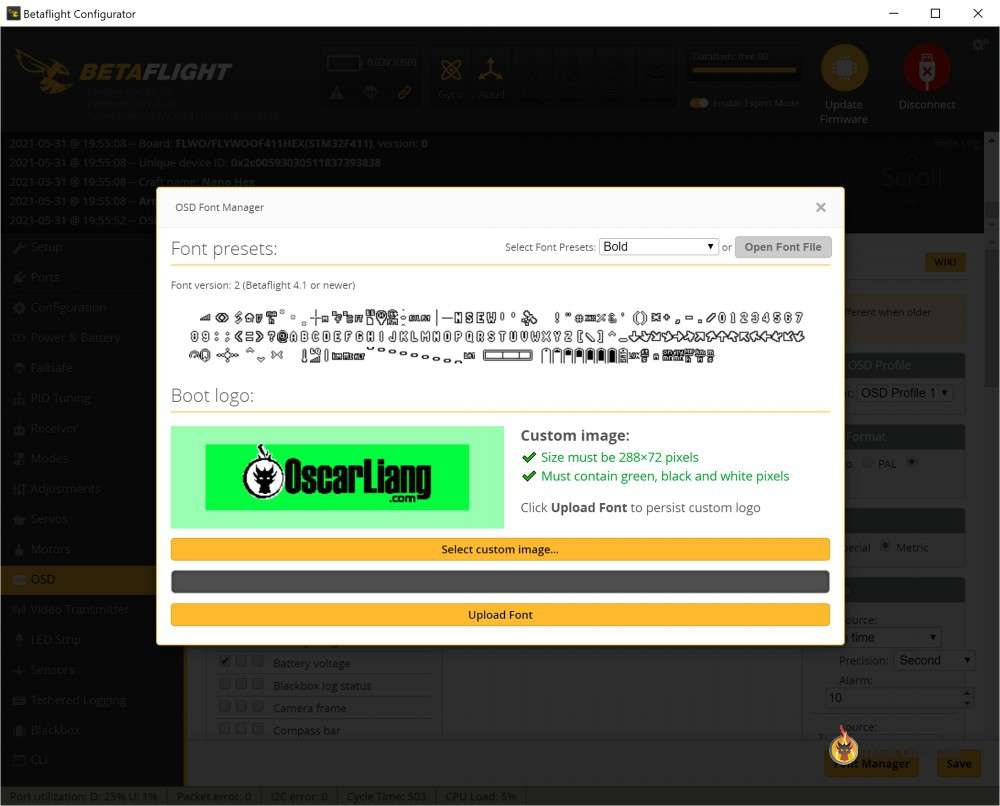
19.4 OSD字体

Betaflight OSD菜单 — 飞控OSD菜单交互界面
OSD使用特定的位图字体,每个字符由像素阵列定义。Betalight提供了多种字体选择,用户可以根据个人喜好和显示效果选择合适的字体。字体选择影响OSD的可读性。
某些字体设计更加清晰,适合远距离观看;某些字体包含更多符号,提供更多信息。用户也可以自定义字体,创建个性化的OSD显示效果。自定义字体可以满足特殊需求。
19.5 OSD高级功能
条件显示:某些元素可以设置显示条件,如仅在特定飞行模式下显示,或仅在特定事件触发时显示(如低电压警告)。条件显示使OSD更智能。
实时调整:某些OSD参数可以在飞行中通过遥测调整,如OSD开关、亮度调节等。实时调整增加了便利性。
视频叠加:除了显示飞行数据,OSD还可以叠加其他视频效果,如黑框、彩色图标等。视频增强是高级功能。
第二十章:滤波器系统详解

Betaflight滤波器频率响应示意图 — PT1/BIQUAD/RPM/动态滤波器
20.1 为什么需要滤波器
无人机飞行中会产生各种振动,这些振动会传递到陀螺仪上,影响姿态测量的准确性。如果不进行滤波处理,这些噪声会进入PID控制器,导致电机产生不必要的震动,甚至引发自激振荡。滤波器是抑制振动干扰的关键。
振动来源包括:电机振动、螺旋桨不平衡、机架共振、空气扰动等。这些振动的频率范围很广,从几十Hz到几千Hz不等。不同来源的振动需要不同的滤波方法。
20.2 滤波器类型
Betaflight提供了多种类型的滤波器,每种滤波器有其特定的应用场景和工作原理。滤波器组合使用以达到最佳效果。
硬件滤波器:陀螺仪芯片内置的硬件低通滤波器,可以滤除高频噪声。硬件滤波在传感器层面进行,不会占用CPU资源。硬件滤波是第一道防线。
PT1滤波器:一阶低通滤波器,计算简单,适合滤除较高频率的噪声。PT1滤波器会引入相位延迟。PT1是常用的简单滤波器。
BIQUAD滤波器:二阶低通滤波器,提供更好的滤波效果但计算量更大。BIQUAD滤波器可以配置为低通、高通、带通等类型。BIQUAD是功能强大的滤波器。
RPM滤波器:这是Betaflight的革命性功能,利用电机的实际转速信息来预测和消除电机振动。RPM滤波器能够精确地滤除与电机转速相关的振动频率。RPM是最先进的滤波器。
动态滤波器:动态分析陀螺仪数据,自动检测和滤除特定频率的噪声。动态滤波器能够适应不同的飞行条件。动态滤波器是智能滤波。
20.3 Gyro和D-Term滤波器
Betaflight中陀螺仪数据(Gyro)和D项计算使用独立的滤波器链。这种分离设计允许对不同数据流进行针对性的滤波处理。分离滤波是优化性能的重要手段。
Gyro滤波器:直接应用于原始陀螺仪数据,滤除大部分振动噪声。Gyro滤波器的设置直接影响整个控制系统的噪声水平。Gyro滤波是基础。
D-Term滤波器:专门为D项计算设计的滤波器。D项对噪声非常敏感,过多的噪声会导致D项输出过大,引起振荡。因此D-Term滤波器通常比Gyro滤波器更严格。D-Term滤波需要特别注意。
20.4 RPM滤波器详解
RPM滤波器是Betaflight 6.0引入的最重要功能之一。它利用电调返回的电机转速信息,精确识别电机振动频率,然后设计针对性的陷波滤波器来消除这些特定频率的噪声。RPM滤波彻底改变了飞控性能。
RPM滤波器的工作原理:电调通过ESC Telemetry将电机转速信息传回飞控;飞控根据电机转速计算电机振动的主要频率(通常为电机转速的倍数);动态创建陷波滤波器,滤除这些特定频率;随着电机转速变化,滤波器参数自动调整。RPM滤波器是自适应的。
使用RPM滤波器的条件:电调支持RPM Telemetry(如BLHeli_32, KISS ESC);飞控和电调之间使用DShot协议连接;正确配置电调以启用Telemetry功能。RPM需要硬件支持。
20.5 动态滤波器
动态滤波器(Dynamic Filter)是另一种智能滤波技术,它自动分析陀螺仪数据,检测异常频率成分并创建滤波器来抑制它们。动态滤波器是非电机振动的主要解决方案。
动态滤波器特别适合处理那些不与电机转速直接相关的振动,如机架共振、螺旋桨缺陷等。它能够自动适应不同的飞机配置和飞行条件。动态滤波器是自动化的解决方案。
20.6 滤波器调参指南
正确设置滤波器是获得良好飞行手感的关键。以下是滤波器调整的一般原则。滤波器调整需要谨慎。
从默认值开始:Betalight为不同类型的飞控提供了默认滤波器设置,这些设置是经过测试的合理起点。默认设置是可靠的起点。
观察黑盒数据:通过黑盒记录的陀螺仪数据,可以分析噪声频谱,找出主要干扰频率。黑盒分析是滤波器调整的重要工具。
逐步调整:如果飞行中出现抖动,先确认是滤波器不足还是过强。抖动通常意味着滤波不足;反应迟钝则可能意味着滤波过度。逐步调整可以避免问题。
测试不同设置:每次只改变一个参数,记录改变前后的飞行感受,逐步找到最佳设置。系统化测试是最佳方法。
第二十一章:电池管理系统
LiPo锂电池 — 多旋翼无人机的动力来源
21.1 电池监测基础
Betalight具备完善的电池监测功能,实时监控电池状态并通过OSD向飞手显示关键信息。这些信息对于安全飞行至关重要,能够帮助飞手判断剩余电量并及时返航。电池监测是安全飞行的基础。
电池监测的基本参数包括:电池电压(当前电池总电压和每节电芯电压)、消耗电量(mAh)、当前电流、预估剩余飞行时间等。这些参数帮助飞手做出飞行决策。
21.2 电压监测
飞控通过ADC(模数转换器)读取电池电压。对于3S电池(11.1V),满电电压约12.6V,放电截止电压约9V(每节3V)。电压是电池状态的直接指标。
Betalight允许设置多个电压阈值,每个阈值可以触发不同的警告级别:警告电压发出BB响提醒,OSD显示警告;严重警告电压更强烈的提醒,限制飞行能力;紧急电压强制降落或停机,保护电池。多级保护确保安全。
21.3 电流监测
连接电流传感器后,飞控可以实时监测电池输出电流。结合电压和电流数据,系统可以计算消耗的电量和预估的剩余飞行时间。电流监测提供更准确的电量估算。
电流传感器通常连接在飞控的电流检测引脚上。常见的连接方式是使用功率计(Power Module)或者独立的电流传感器。功率计是常用配件。
使用电流监测需要正确设置传感器的标定参数,以确保测量准确。标定是准确测量的前提。
21.4 BB响功能
BB响(Beeper)是Betaflight的重要安全功能,通过蜂鸣器发出声音提醒飞手。当电池电压过低、信号丢失或发生其他警告事件时,BB响会发出警报。BB响是重要的听觉警告。
BB响支持多种声音模式,用户可以根据喜好选择。某些飞控板内置蜂鸣器,某些需要外接。内置BB响更方便。
21.5 电池保护策略
过度放电会永久损坏锂聚合物电池,因此合理的保护策略非常重要。Betalight提供多层次的保护。保护策略应该合理设置。
软件保护:通过设置电压阈值,在电压过低时警告或强制停机。软件保护是基本保护。
容量保护:可以设置最大消耗电量,超过后发出警告。容量保护防止过放。
积分保护:综合电压和容量数据,更准确地评估电池状态。积分保护提供更准确的评估。
第二十二章:Betaflight Configurator使用指南
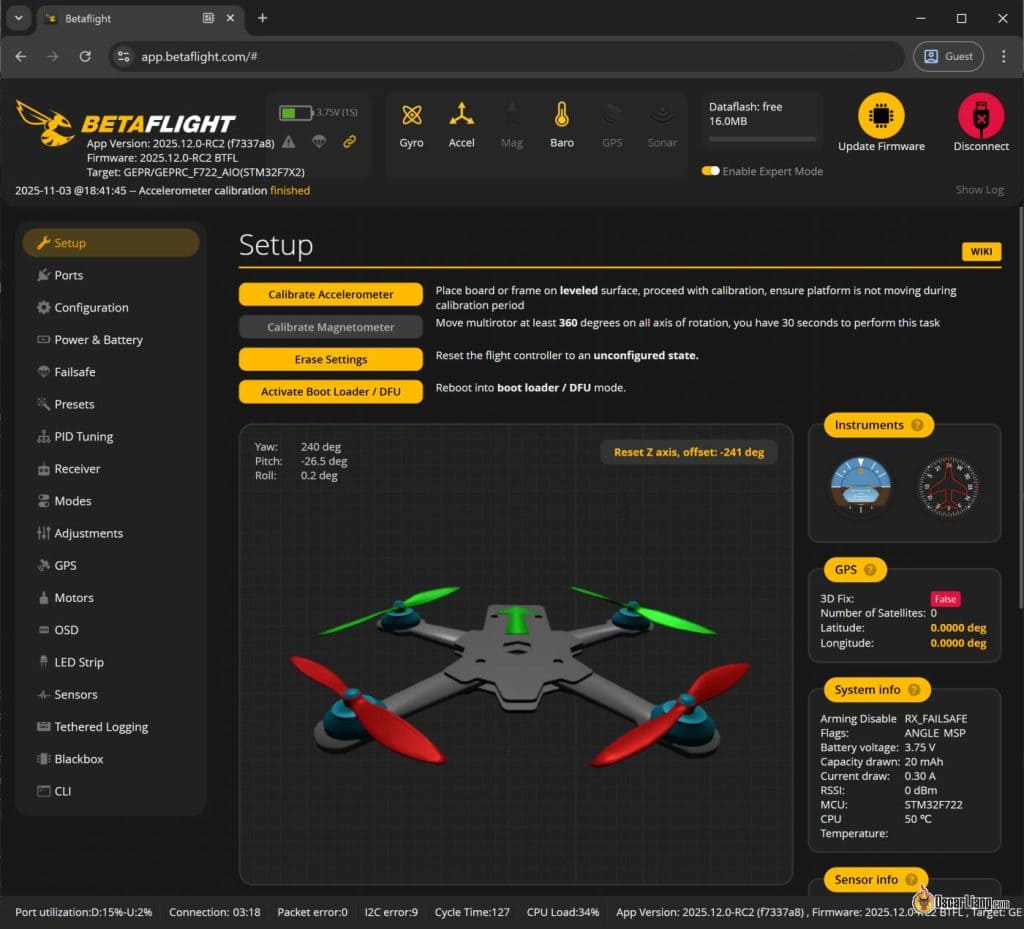
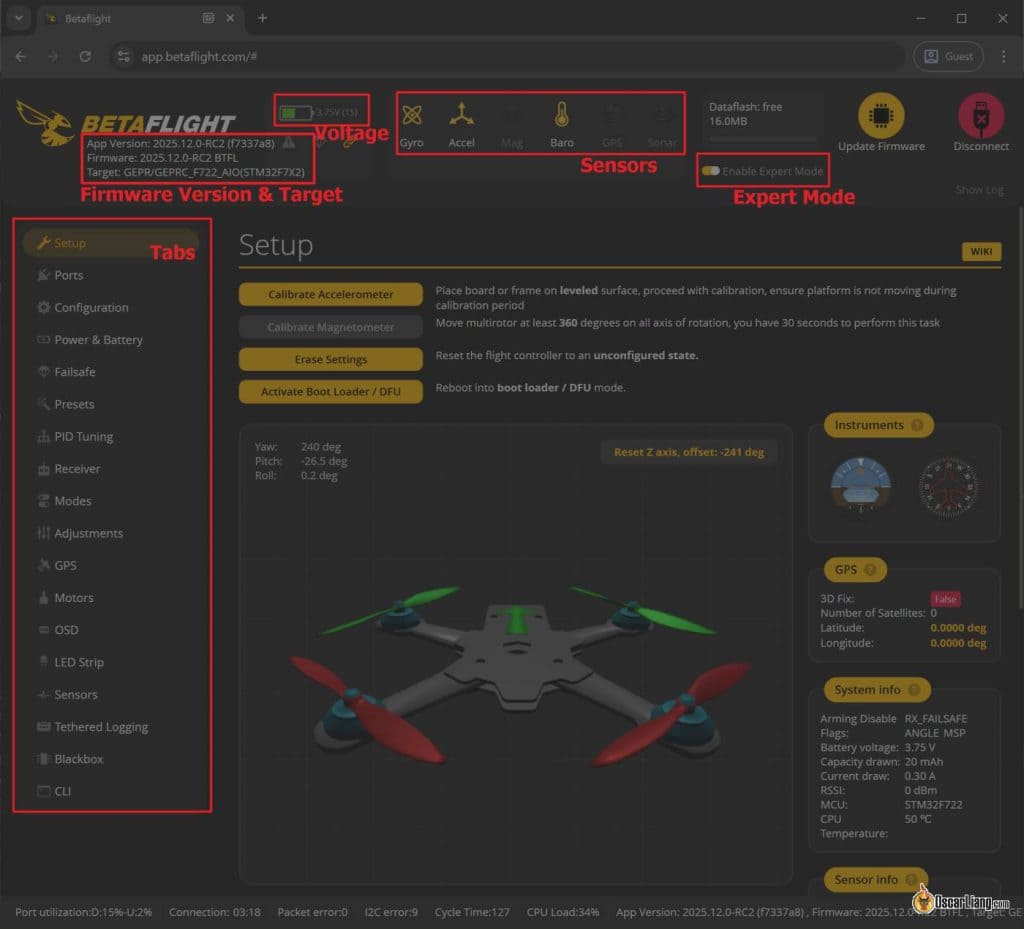
Betaflight Configurator 设置界面 — 飞控3D模型与基础信息
22.1 Configurator简介
Betaflight Configurator是官方提供的图形配置工具,用于设置飞控的各种参数。它提供了直观的界面,让用户无需记忆复杂的CLI命令就能完成飞控配置。Configurator使飞控配置变得简单。
Configurator支持Windows、macOS和Linux系统,可以从官方网站或GitHub下载。保持Configurator更新到最新版本以获得最佳兼容性和新功能。定期更新Configurator很重要。
22.2 连接飞控
使用USB数据线连接飞控到电脑,然后打开Configurator。飞控需要先进入刷写模式(DFU模式或Bootloader模式),通常通过特定的操作顺序进入。连接飞控是配置的第一步。
如果飞控已经刷写了Betaflight固件,通常可以直接通过USB连接。Configurator会自动检测并连接到飞控。自动检测简化了连接过程。
22.3 主要配置界面
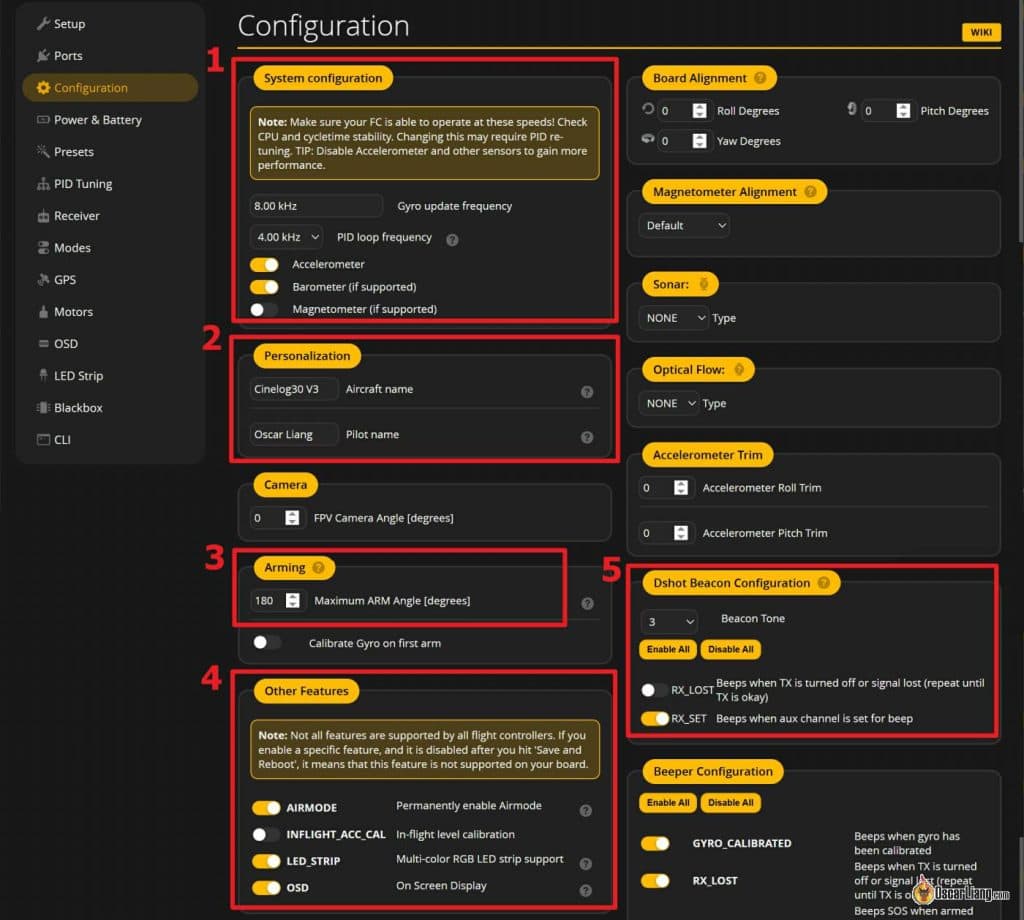
Betaflight Configurator 配置标签页 — 飞控各项参数设置
Configurator的配置界面分为多个标签页
端口(Ports)页面:配置各个UART端口的用途,如GPS、遥测、接收机等。Ports配置决定外设连接。
配置(Configuration)页面:基础硬件配置,包括传感器方向、电机协议、接收机类型等。Configuration是基础设置。
PID调整(PID Tuning)页面:PID参数、滤波器设置、飞行模式配置等核心参数。PID Tuning是最重要的页面。
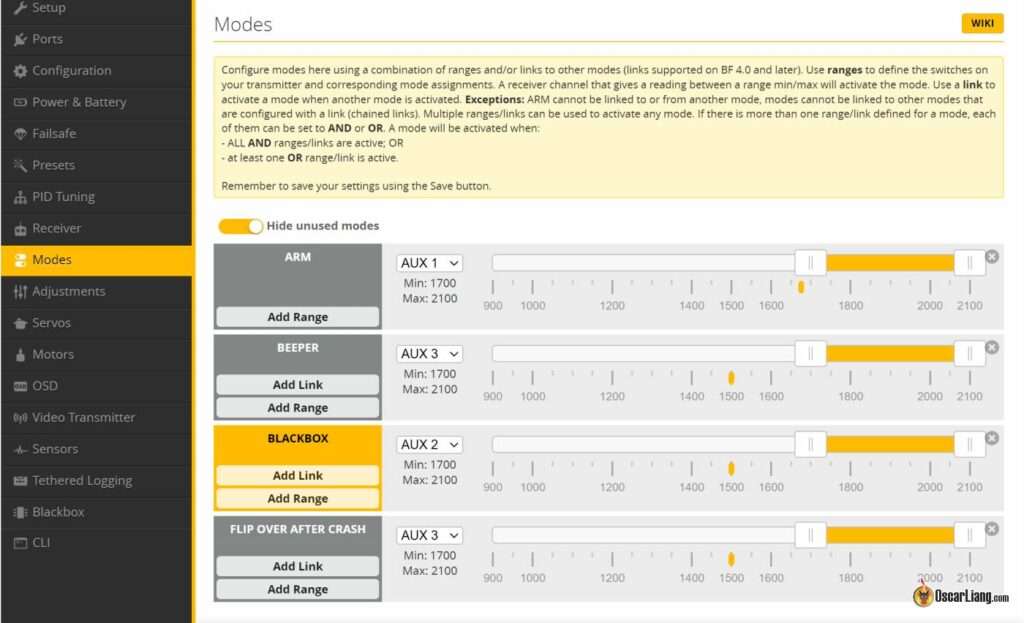
模式(Modes)页面:配置飞行模式的切换开关和触发条件。Modes配置决定飞行行为。
接收机(Receiver)页面:接收机配置和通道映射。Receiver配置影响控制响应。
OSD页面:OSD元素配置和布局调整。OSD配置个性化显示。
功率和电池(Power & Battery)页面:电池监测和电源配置。Power设置影响安全监控。
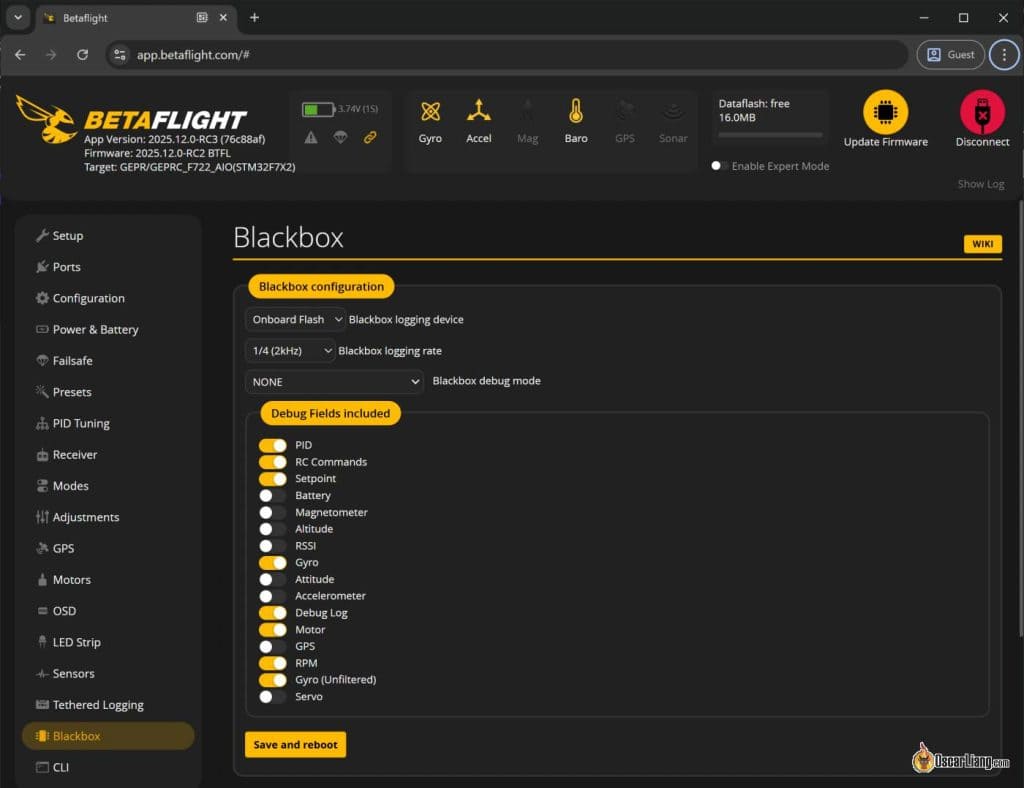
黑盒(Blackbox)页面:黑盒记录配置。Blackbox设置用于数据记录。
22.4 固件更新
Configurator可以用于更新飞控固件。点击"更新固件"按钮,选择要刷写的版本,然后按照提示操作即可。固件更新带来新功能和修复。
刷写固件会清除所有设置,因此建议先备份当前配置。刷写完成后可以导入配置或手动重新设置。备份配置是重要习惯。
22.5 配置备份和恢复
Configurator允许导出和导入飞控配置。导出配置可以备份当前设置,或与他人分享配置。导入配置可以快速应用经过验证的设置。配置分享加速学习。
注意:不同版本的固件或不同型号的飞控,配置可能不完全兼容。导入配置后需要仔细检查各项设置。检查导入配置是必要步骤。
第二十三章:CLI命令完全参考
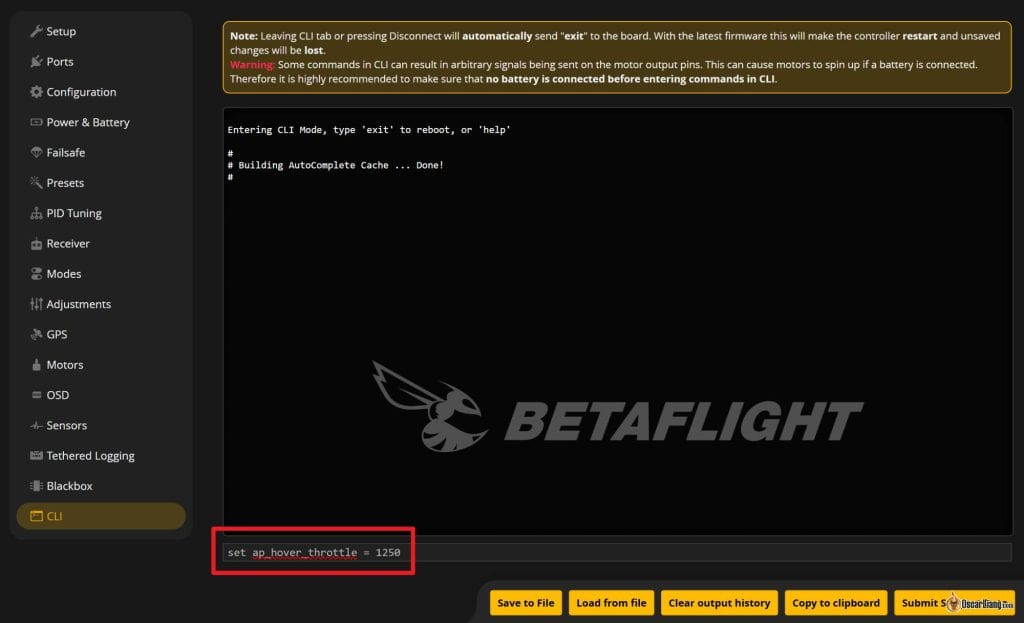
Betaflight CLI 终端界面 — 命令行配置飞控
23.1 CLI简介
CLI(Command Line Interface,命令行接口)是Betaflight的高级配置方式,提供了比图形界面更精细的控制能力。某些高级功能只能通过CLI配置。CLI是高级用户的工具。
在Configurator中点击"CLI"标签即可进入CLI界面。CLI界面底部有一个输入框,可以输入命令并按回车执行。CLI提供直接的控制方式。
23.2 基础CLI命令
dump:显示当前所有配置参数。Dump是查看配置的起点。
dump master:显示默认配置。Master dump显示默认值。
get [parameter]:获取指定参数的值。Get用于查询参数。
set parameter = value:设置参数值。Set用于修改参数。
save:保存配置并重启飞控。Save必须最后执行。
exit:退出CLI。Exit结束会话。
defaults:恢复出厂设置。Defaults重置配置。
23.3 常用配置命令
set min_throttle = 1000 - 设置最小油门值。Min throttle是电机启动阈值。
set max_throttle = 2000 - 设置最大油门值。Max throttle限制最大功率。
set pid_controller = BETAFLIGHT - 设置PID控制器类型。PID controller选择控制算法。
set gyro_lowpass_hz = 100 - 设置陀螺仪低通滤波器频率。Gyro filter影响响应。
set dterm_lowpass_hz = 100 - 设置D项低通滤波器频率。D filter影响D项噪声。
set rc_interpolation = AUTO - 设置RC插值模式。RC interpolation平滑输入。
set rc_smoothing = AUTO - 设置RC平滑。RC smoothing减少抖动。
23.4 滤波器配置
set gyro_native = ON - 启用原生陀螺仪采样。Native gyro提高采样率。
set dyn_lpf_curve_expo = 5 - 设置动态LPT曲线指数。Curve expo调整动态响应。
set rpm_filter_q = 2 - 设置RPM滤波器Q值。RPM Q调整滤波宽度。
set dynamic_filter_enabled = ON - 启用动态滤波器。Dynamic filter自动滤波。
23.5 电机和电调配置
set motor_pwm_protocol = DSHOT600 - 设置电机协议。Protocol选择电机控制方式。
set motor_pwm_rate = 8000 - 设置PWM刷新率。PWM rate影响响应速度。
set dshot_bidir = ON - 启用双向DShot。Bidirectional支持RPM telemetry。
23.6 飞行模式配置
set angle_limit = 45 - 设置角度限制。Angle limit防止过度倾斜。
set horizon_limit = 135 - 设置Horizon模式角度限制。Horizon limit是过渡阈值。
set air_mode_activate_throttle = 1200 - 设置Air模式激活油门阈值。Air threshold激活低油门控制。
23.7 高级功能命令
set feedforward_transition = 50 - 设置FF过渡。Transition调整FF响应。
set TPA_Mode = D - 设置TPA模式。TPA mode选择衰减方式。
set anti_gravity_gain = 5 - 设置反重力增益。Anti-gravity稳定加速时姿态。
set vbat_scale = 110 - 设置电池电压比例。VBAT scale校准电压显示。
set current_meter_scale = 400 - 设置电流计比例。Current scale校准电流显示。
23.8 调试和诊断命令

Betaflight CLI 界面 — 翻滚模式设置等高级命令操作
status - 显示系统状态。Status显示运行时信息。
tasks - 显示任务状态。Tasks显示任务调度。
resource - 显示资源使用情况。Resource显示引脚分配。
version - 显示版本信息。Version显示固件版本。
diff - 显示与默认配置的差异。Diff显示自定义设置。
第二十四章:PID调参终极指南
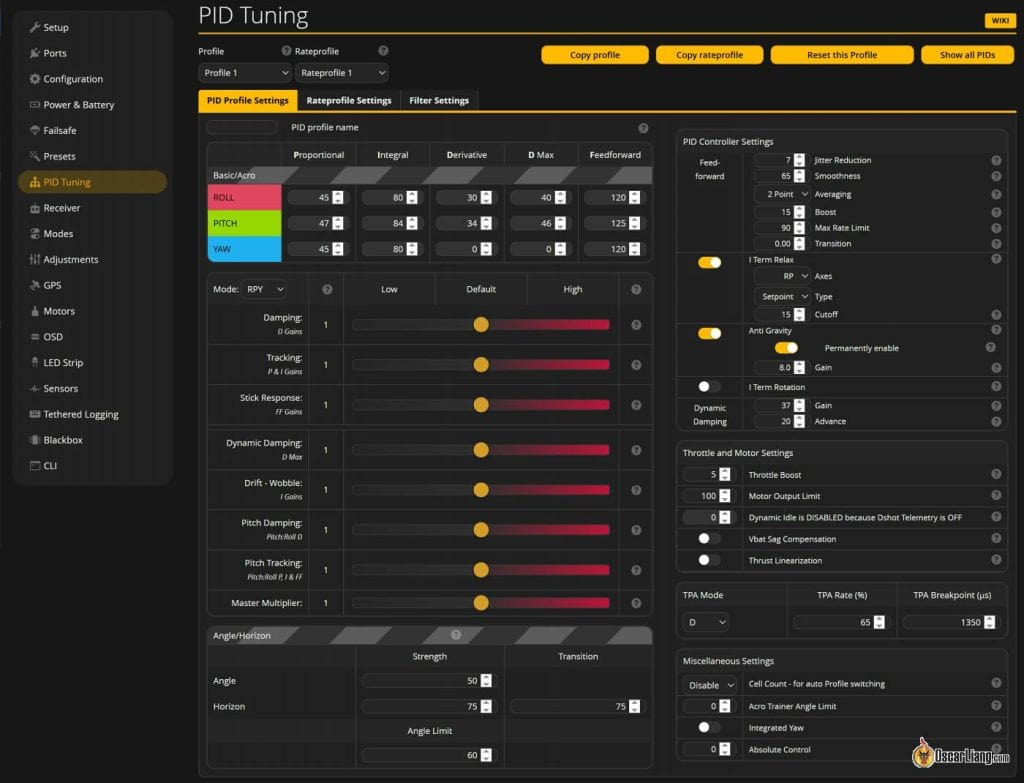
Betaflight PID Tuning 调参界面 — PID参数实时调整
24.1 调参基础概念
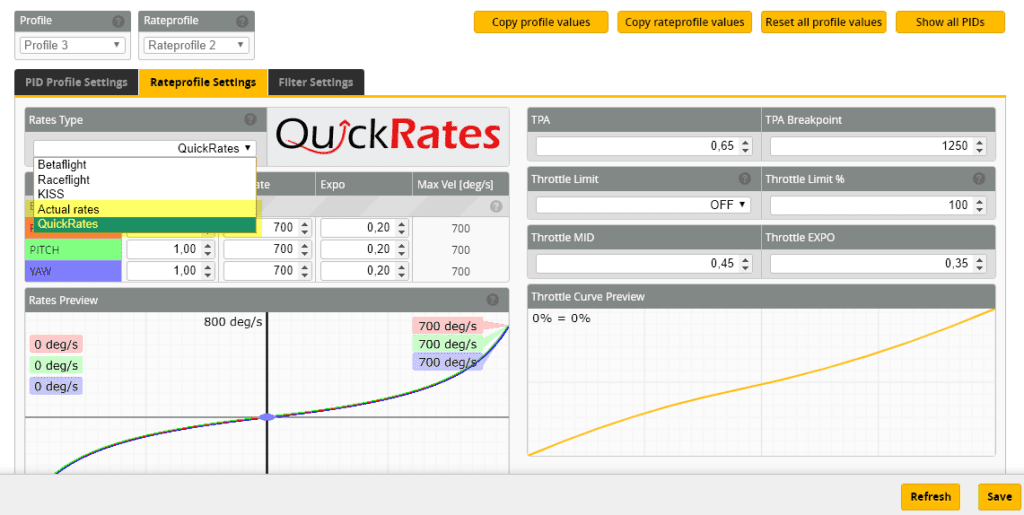
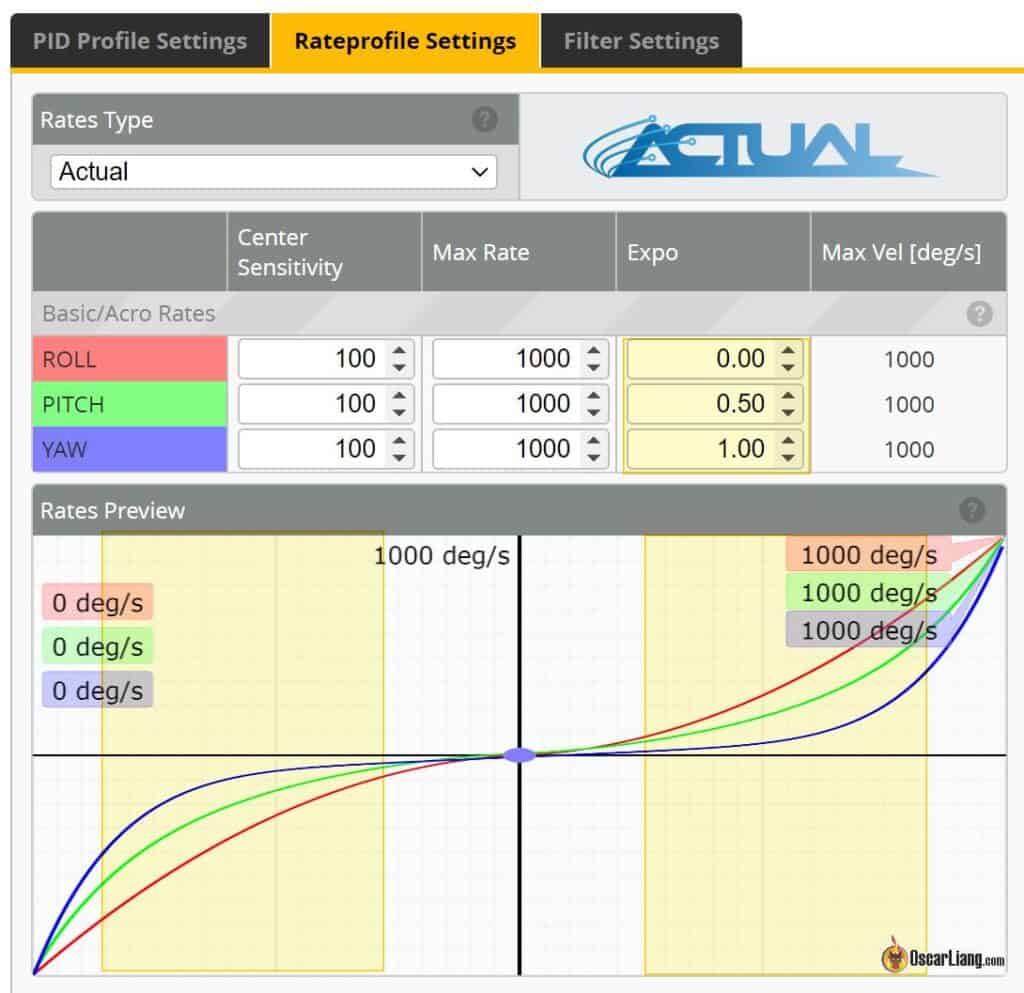
Betaflight Rates 调参界面 — PID调参的基础配置
PID调参是让飞机获得最佳飞行表现的关键步骤。虽然Betalight的默认PID设置对大多数飞机来说已经相当不错,但根据具体的飞机配置和飞行风格进行微调可以进一步提升性能。调参是飞控使用的进阶技能。
调参的目标是找到一个平衡点:既要保证足够的响应速度以满足操作需求,又要避免过度修正导致振荡。在竞速和Freestyle飞行中,通常更强调响应速度;在航拍应用中,更强调稳定性。不同场景有不同的目标。
24.2 调参方法论
增量调参法:每次只改变一个参数,从默认值开始,逐步增加或减少,每次改变后测试飞行感受,记录最佳值。增量法是系统化调参的基础。
粗调+精调:先用较大幅度的调整找到大致合适的范围,然后用小幅度调整精细优化。粗精结合提高效率。
飞行测试:实际飞行测试是调参的唯一真正有效的方法。地面测试无法完全模拟实际飞行的所有情况。飞行测试是最终验证。
24.3 P(比例)参数调整
P参数决定了对误差的反应强度。P值过低会导致响应迟钝;P值过高会导致振荡。P是响应的主要来源。
调整P值的步骤:从默认值开始,逐渐增加P值;观察飞行中的响应:过低会感觉迟钝,过高会产生高频抖动;找到刚好产生轻微振荡的值,然后稍微降低一点;这是最佳的P值。找到最佳P需要经验。
P值通常不需要在三个轴上设置相同的值。滚转轴通常可以设置更高的P值,因为这个轴的受力最大。Roll轴可以承受更高P值。
24.4 I(积分)参数调整
I参数决定了对持续误差的累积反应。I值主要影响飞机的姿态保持能力。I解决长期精度问题。
调整I值的步骤:从默认值开始;在有风的情况下测试:如果飞机漂移明显,增加I值;增加I值直到感觉反应变得迟钝;适当降低以恢复响应速度。I需要风测试。
I值不足的表现:飞机无法保持设定姿态,会慢慢漂移开。I值过高的表现:反应迟钝,操作延迟感明显。两种极端都影响飞行。
24.5 D(微分)参数调整
D参数提供阻尼效果,抑制过度修正。D值越高,修正越温和,但D值过低会导致修正过度振荡。D是阻尼器。
调整D值的步骤:从默认值开始;尝试增加D值,观察飞行是否更平稳;如果感觉反应变慢,降低D值;找到最佳平衡点。D是精细调整。
注意:D值过大会放大传感器噪声,可能导致振荡。D值通常应该是三个值中最小的。噪声放大大多有害。
24.6 FF(Feed Forward)调整
FF参数提供前馈控制,直接根据输入产生控制输出,减少延迟。FF主要影响响应速度和"跟手"程度。FF是最重要的响应参数。
调整FF的方法:从默认值(通常为0)开始;逐步增加FF值;观察响应速度是否提升;找到感觉响应最跟手但没有过冲的值。FF直接提升响应。
FF和P共同决定了整体响应。增加FF可以减少对P的依赖,使响应更直接。FF与P有互补关系。
24.7 整体调参流程
Betaflight Max Rate 参数 — PID调参的Rate极限设置
一个完整的调参流程建议如下。第一步:确保硬件状态良好。螺旋桨平衡、电机安装牢固、减震良好。硬件是基础。第二步:使用默认PID进行基础飞行测试,记录当前状态。基线测试。第三步:调整P值。增加直到轻微振荡,然后降低10-20%。P调整。第四步:调整I值。在有风条件下测试,增加直到保持姿态良好但不过于迟钝。I调整。第五步:调整D值。增加直到反应变慢,然后适当降低。D调整。第六步:调整FF值。增加直到响应最直接。FF调整。第七步:进行各种飞行动作测试,包括翻滚、悬停、加速等,检查是否有异常。综合测试。第八步:使用黑盒数据分析PID控制输出,优化设置。数据分析。
24.8 常见PID问题及解决方案
高频抖动:P值过高或D值过低。解决方案:降低P,增加D。抖动通常是P太高。
慢速漂移:I值过低。解决方案:增加I值。漂移说明保持不住。
反应迟钝:P或I值过低,或FF值过低。迟钝需要提高响应。
动作过冲:P或FF值过高。解决方案:降低这些值。过冲需要降低响应。
高速时振荡:可能需要启用TPA。解决方案:启用并调整TPA设置。高速振荡是高油门问题。
第二十五章:滤波器调参
Blackbox 噪声频率分析 — 滤波器调参的核心判断工具
25.1 滤波器调参基础
滤波器设置直接影响飞行表现和信息质量。适当的滤波能够消除振动干扰,提供干净的传感器数据;过度滤波则会延迟信息,降低响应速度。滤波器平衡噪声和响应。
Betalight的滤波器系统非常复杂,但对于大多数用户,默认设置已经足够好。只有在遇到特定问题时才需要调整滤波器。大多数用户不需要调整。
25.2 Gyro滤波器设置
Gyro滤波器作用于原始陀螺仪数据,是整个滤波器链的第一环。Gyro滤波是基础。
Gyro Lowpass滤波器:滤除高频振动噪声。频率设置越低,滤波效果越强,但延迟也越大。低通频率越低越平滑。
默认设置通常在100-150Hz范围内。对于有较多振动的飞机,可以降低到80Hz或更低;对于振动较小的干净配置,可以使用更高的值如200Hz。配置决定设置。
25.3 D-Term滤波器设置
D-Term滤波器专门为D项计算设计,因为D项对噪声非常敏感。D噪声会被放大。
D-Term滤波器通常应该比Gyro滤波器更严格(频率更低),因为D项直接使用陀螺仪数据计算,更容易受到噪声影响。更严格保护D项。
常见的D-Term Lowpass设置为70-100Hz。如果D项产生振荡,可以尝试降低这个值。70-100是常用范围。
25.4 RPM滤波器配置
Blackbox日志配置 — 滤波器性能记录与分析
RPM滤波器是最有效的电机振动滤除方案,但需要正确的硬件配置。RPM是电机振动克星。
配置步骤:确认电调支持RPM Telemetry;使用DShot协议连接电调;在电调配置中启用RPM Telemetry;在Betaflight中启用RPM滤波器。四步完成配置。
RPM滤波器的效果非常显著,建议在条件允许的情况下启用。RPM值得启用。
25.5 动态滤波器配置
动态滤波器可以自动检测和处理非电机相关的振动。动态是自动解决方案。
启用动态滤波器后,系统会自动分析陀螺仪数据,识别异常频率并创建滤波器。自动分析是智能的。
动态滤波器的计算量较大,在某些处理器上可能会导致CPU过载。如果出现CPU警告,需要降低动态滤波器的设置或关闭它。CPU限制要考虑。
25.6 滤波器调整的判断方法
判断滤波器是否需要调整的最佳方法是使用黑盒记录。观察黑盒中的陀螺仪数据,检查是否存在以下问题。黑盒是分析工具。
过多的高频噪声:需要在高频段增加滤波。太多高频需要滤波。
特定频率的峰值:可能是机架共振,需要针对性的陷波滤波器。峰值需要陷波。
滤波后数据延迟过大:可能是滤波过度,需要降低滤波强度。延迟大要降低滤波。
第二十六章:失控保护配置
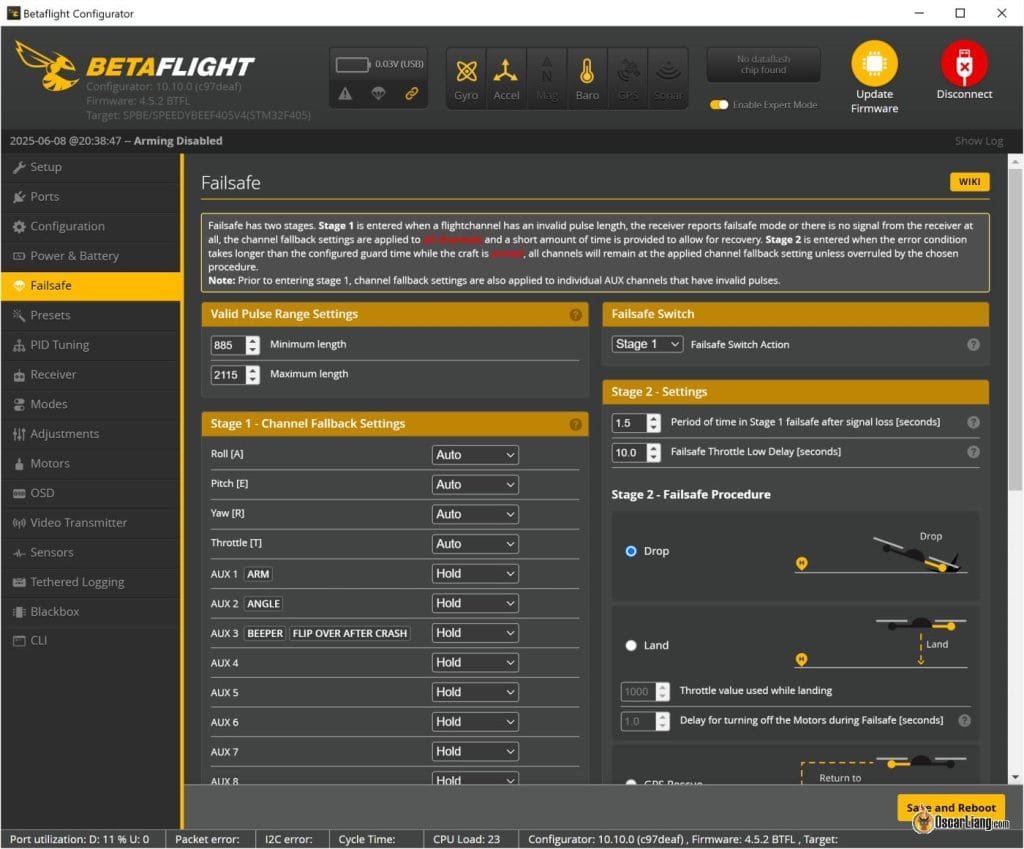
Betaflight 失控保护配置界面 — 多重安全保护机制
26.1 失控保护的重要性
失控保护(FailSafe)是飞控的重要安全功能,当遥控信号丢失时自动采取保护措施,防止飞机飞丢或造成更大损失。失控保护是安全保障。
正确的失控保护配置能够确保在遥控信号中断时,飞机能够安全处置,避免对人和财产造成伤害。正确配置保护安全。
26.2 失控保护触发条件
Betaflight通过多种方式检测失控:信号丢失(接收机停止发送有效信号)、信号丢失帧数(连续多帧没有收到信号)、帧间隔超时(接收数据帧之间的间隔过长)。触发方式有多种。
具体触发阈值可以在配置中调整,通常使用默认值即可。默认通常足够。
26.3 失控保护动作
当失控保护触发时,可以配置多种保护动作:下降(Drop)直接关闭所有电机,飞机自由落体;降落(Land)自动控制飞机缓慢降落;返航(Return to Home)自动飞回起飞点;悬停(Hover)保持当前高度和位置,等待信号恢复。动作决定后果。
对于大多数FPV飞行,建议配置为"下降"并同时启用低电压检测,确保电池电压足够完成降落。降是默认选项。
对于带有GPS的飞机,可以配置为"返航",这样即使信号丢失飞机也能自动返回。RTH需要GPS。
26.4 失控保护配置建议
无论选择哪种模式,都应该进行实际的失控保护测试,确保配置正确工作。测试验证配置。
26.5 测试失控保护
建议在安全环境下测试失控保护功能:确保飞机电池电量充足;选择开阔的安全场地;起飞并飞到安全高度;关闭遥控器或移除接收机天线;观察飞机的失控保护行为;确认行为符合预期后恢复控制。测试要安全。
第二十七章:Betaflight OS (BFOS)

BFOS概念图 — Betaflight下一代操作系统的核心特性
27.1 BFOS简介
Betaflight OS(BFOS)是Betaflight项目正在开发的下一代飞控操作系统。与传统的飞控固件相比,BFOS提供了更丰富的功能和更好的用户体验。BFOS是未来。
BFOS基于更现代的软件架构,集成了更多的功能,包括更先进的滤波算法、更好的OSD系统、以及更友好的配置界面。新架构带来新能力。
27.2 BFOS的主要特性
统一的固件平台:BFOS使用统一的代码库,支持更多的硬件平台,简化了开发和维护。统一简化开发。
改进的滤波器:引入了更先进的滤波算法,提供更好的噪声抑制性能。新滤波器更好。
增强的OSD:支持更高分辨率的OSD显示,更丰富的图形元素。OSD更强大。
更快的配置:改进了配置流程,减少了设置所需的时间。配置更快捷。
27.3 BFOS与传统Betaflight的区别
BFOS在保持与Betaflight兼容的同时,引入了一些新的概念和功能。对于普通用户,BFOS提供了开箱即用的优秀体验;对于高级用户,BFOS提供了更精细的控制能力。兼容并改进。
BFOS仍在开发中,部分功能可能尚未完善。用户在选择是否迁移到BFOS时需要权衡新功能带来的好处和可能的风险。开发中需谨慎。
第二十八章:4K/8K刷写率技术

4K/8K控制循环频率对比图 — 延迟与性能差异
28.1 刷写率概念
刷写率(Looptime)是指飞控每秒执行控制循环的次数。刷写率越高,控制响应越快、越精确。Looptime是关键指标。
传统飞控使用1kHz(每秒1000次)的刷写率;现代竞速飞控支持4kHz甚至8kHz的刷写率。更低延迟是目标。
28.2 高刷写率的优势
更低的延迟:控制指令的响应时间更短。延迟更低。
更精确的控制:控制量更新更频繁,电机响应更平滑。更平滑。
更好的飞行表现:特别是在高速飞行和剧烈机动时。表现更好。
28.3 高刷写率的挑战
处理器负载:更高的刷写率意味着更多的计算任务。负载更高。
滤波器限制:某些滤波器在极高刷写率下可能需要特殊设置。特殊设置。
电调兼容性:需要电调支持高速PWM信号。电调要支持。
28.4 配置建议
对于大多数竞速应用,4kHz是一个很好的平衡点。它提供了足够的响应速度,同时不会对处理器造成过大负担。4K是平衡点。
8kHz更适合专业竞赛或特定场景,但需要确保所有硬件都能支持。8K适合竞赛。
选择刷写率时还要考虑滤波器的设置,确保整个系统能够协调工作。系统协调重要。
第二十九章:动态滤波技术
Blackbox 陀螺仪轨迹图 — 动态滤波效果分析
29.1 动态滤波器原理
动态滤波器(Dynamic Filter)是Betaflight的智能噪声处理功能。它自动分析陀螺仪数据,检测异常频率成分,并创建针对性的滤波器来消除这些噪声。智能滤波是未来。
与传统的固定参数滤波器不同,动态滤波器能够自动适应不同的飞行条件和飞机配置。自适应是核心能力。
29.2 动态滤波器的工作方式
动态滤波器在后台持续运行,分析陀螺仪数据的频谱。当检测到异常频率成分时,会自动创建或调整滤波器来抑制这些噪声。持续运行监控。
动态滤波器的优势在于它不需要用户进行复杂的配置,系统会自动处理大多数情况。自动处理简化使用。
29.3 动态滤波器的配置
动态滤波器的主要配置参数包括:启用/禁用可以随时启用或关闭动态滤波器;分析范围设置要分析的频率范围;最小启动阈值设置动态滤波器开始工作的电机转速。配置有这些选项。
默认设置对于大多数情况已经足够好,不需要频繁调整。默认足够好。
29.4 使用注意事项
动态滤波器会增加处理器负担。在某些处理器上,可能需要降低动态滤波器的设置或关闭它以避免CPU过载。CPU是限制因素。
如果发现处理器使用率过高或有警告信息,首先考虑关闭动态滤波器。降低使用。
第三十章:跑马灯和LED控制
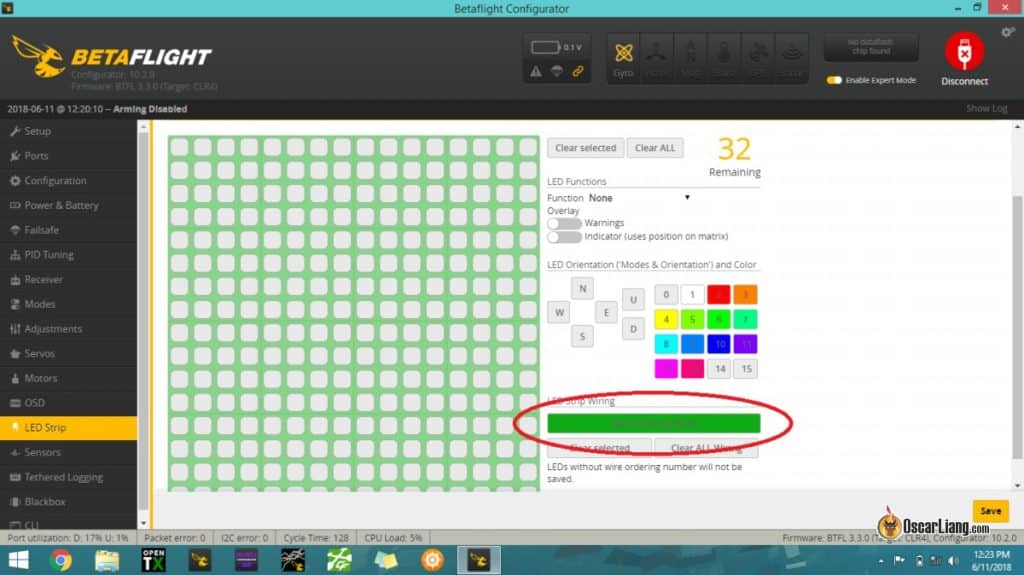
Betaflight LED配置界面 — RGB灯带顺序与模式设置
30.1 LED系统简介
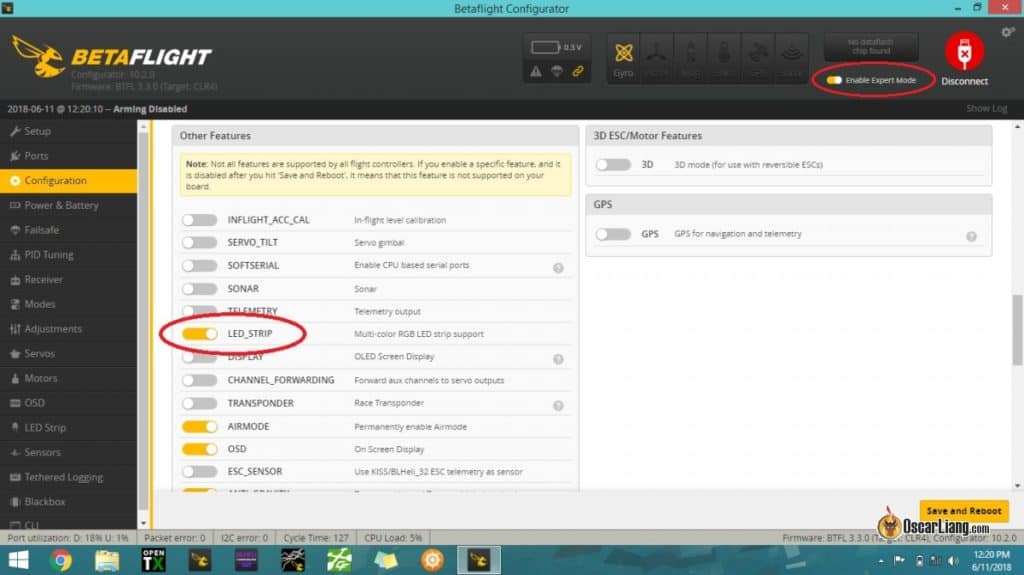
Betaflight 开启LED功能 — Features页面启用LED_STRIP
Betaflight支持连接WS2812(也称NeoPixel)等可编程RGB LED,用于指示飞行状态、飞行模式或作为装饰效果。LED增添趣味。
LED系统可以显示各种信息,如电池电量、飞行模式、GPS状态等,也可以在飞行中创建炫酷的灯光效果。信息显示是功能。
30.2 LED硬件连接

WS2812 RGB LED灯带 — 飞控的LED硬件安装实物
LED通常需要连接到飞控的特定引脚上。连接时需要注意:电源WS2812 LED需要5V供电,某些飞控提供专用的LED电源输出;信号连接到飞控的LED引脚,通常有多个通道;数量限制每条信号线可以连接多个LED,但需要注意总电流限制。连接有讲究。
30.3 LED模式配置
通过Configurator或CLI可以配置每个LED的功能。常见的配置包括:模式指示不同的飞行模式显示不同的颜色;电池状态根据电池电压显示不同颜色;导航指示显示航向信息;装饰效果各种动态灯光效果。配置灵活。
30.4 跑马灯效果
跑马灯(LED Strip)是WS2812 LED的一种典型应用,创造出流动的光效。跑马灯是经典效果。
Betalight支持多种跑马灯效果,可以在配置中选择。效果可以在飞行中自动切换,也可以通过开关控制。效果可选可切换。
第三十一章:无线通信系统
FPV图传眼镜 — 第一人称视角的沉浸式体验
31.1 遥控系统概述
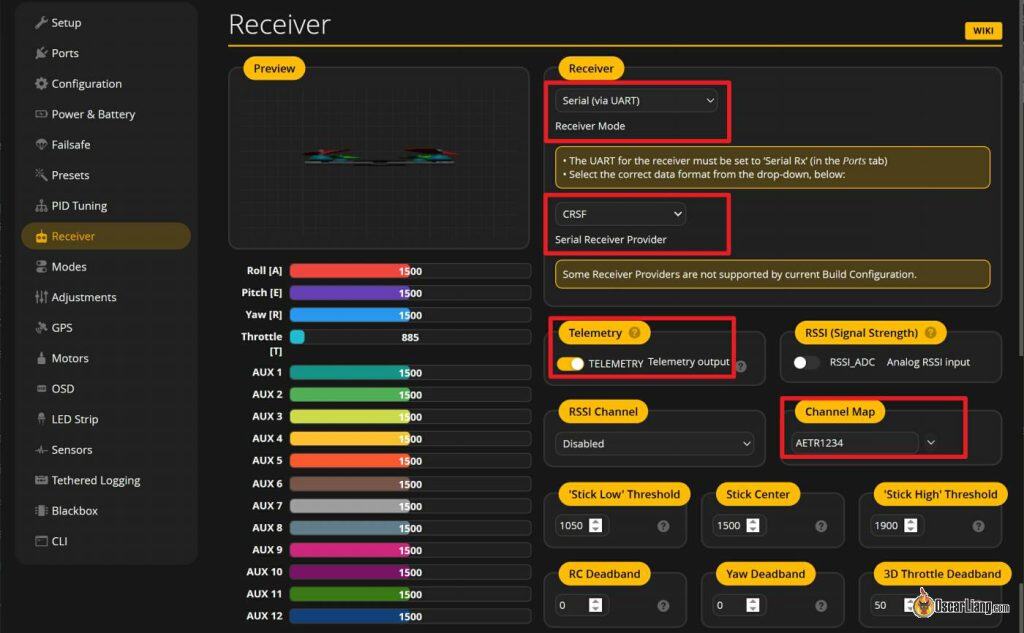
Betaflight 接收机配置界面 — 无线通信协议与通道映射
无线通信是FPV飞行的基础,包括遥控信号和图像传输两个主要部分。Betalight支持多种遥控协议,可以连接不同类型的接收机。通信是基础。
31.2 常见遥控协议
PWM:传统模拟协议,每个通道一根信号线,连接简单但线缆较多。PWM是传统。
SBUS:数字协议,通过单根信号线传输最多16个通道,广泛使用。SBUS是常用。
CRSF(ExpressLRS):ELRS专用的遥控协议,支持高速、低延迟、高可靠性的双向通信。ELRS是趋势。
IBUS:Flysky专用的数字协议。IBUS是Flysky专用。
DSM/DSMX:Spektrum的专用协议。DSM是Spektrum专用。
31.3 ExpressLRS(ELRS)
ExpressLRS是开源的高性能遥控协议,在FPV领域越来越受欢迎。它提供极低的延迟(通常低于4ms)和远距离传输能力。ELRS高性能。
ELRS使用CRSF协议与飞控通信,需要在Betaflight中正确配置UART端口。配置需要正确。
31.4 图传系统
图传(Video Transmitter,VTX)将摄像头画面无线传输到FPV眼镜或显示器。VTX是FPV关键。
Betalight支持多种VTX协议,可以控制发射机的功率、频道等参数。支持多种协议。
Smart Audio:广泛使用的VTX控制协议。Smart是常用。
TRAMP:另一个常用的VTX控制协议。TRAMP也常用。
IRC Tramp:IRC VTX专用协议。IRC专用。
31.5 遥测系统
遥测(Telemetry)将飞行数据从飞机传回遥控器,实现实时监控。Telemetry是双向通信。
Betalight支持多种遥测协议:SmartPort是FrSky的遥测协议;CRSF Telemetry是ELRS的双向通信支持遥测;LTM是轻量级遥测协议。多种协议。
遥测数据可以通过OSD显示,也可以发送到遥控器或地面站软件。数据显示多样。
第三十二章:常见问题诊断
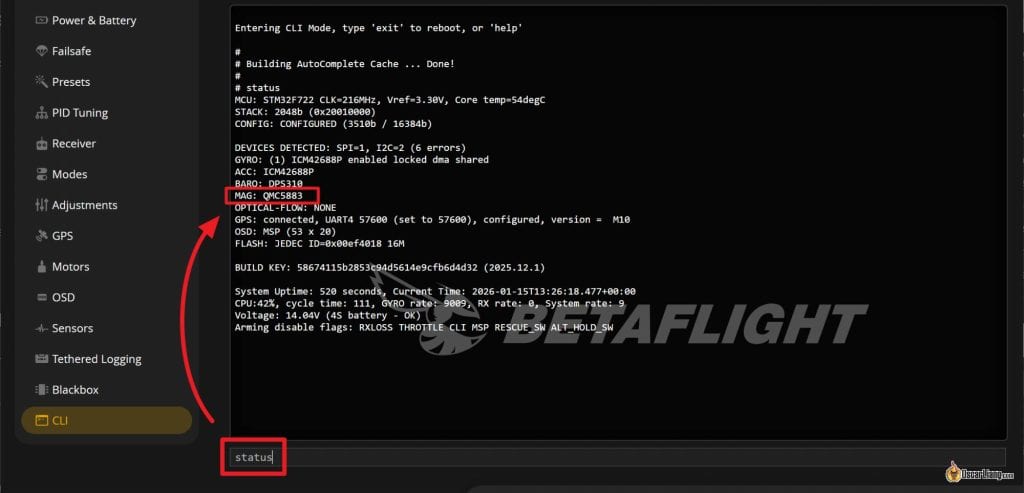
Betaflight CLI状态诊断 — 飞控系统信息与故障排查
32.1 电机不转
电机不转是最常见的问题之一。可能的原因包括:接收机未连接检查接收机是否正确连接并绑定;信号问题检查遥控器与接收机的连接状态;飞控未解锁大多数飞控需要特定操作解锁才能启动电机;油门位置确保油门摇杆在最低位置;飞行模式某些模式下电机可能被禁用。多种可能。
32.2 飞行不稳定
飞行不稳定可能表现为抖动、漂移、振荡等。可能的原因包括:PID参数不当需要重新调整PID参数;振动过大检查螺旋桨平衡、电机状态、减震安装;滤波器设置尝试调整滤波器参数;传感器问题传感器可能需要校准或已损坏;电机/电调问题电机或电调可能有故障。原因多样。
32.3 响应迟钝
操作响应迟钝可能是因为:RC平滑过度检查RC平滑设置;信号延迟检查接收机和遥控器延迟;PID参数过低增加P和FF值;滤波器过度降低滤波器频率设置。原因需要排查。
32.4 电池问题
电压显示不准:需要校准电压比例。校准电压。
低电压警告频繁:检查电池状态或调整警告阈值。检查电池。
消耗电量计算不准:需要校准电流传感器。校准电流。
32.5 GPS问题
GPS无法定位:检查GPS天线朝向和视野。检查天线。
定位精度差:等待更多卫星或检查天线质量。等卫星。
GPS数据异常:检查GPS配置和波特率设置。检查配置。
第三十三章:调试和日志分析
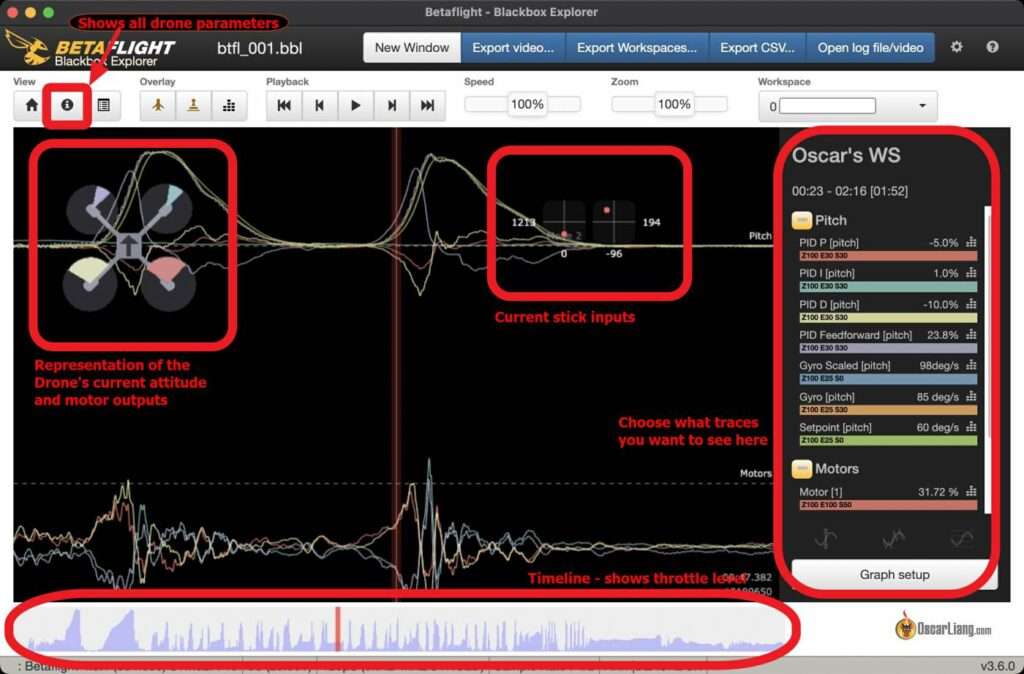
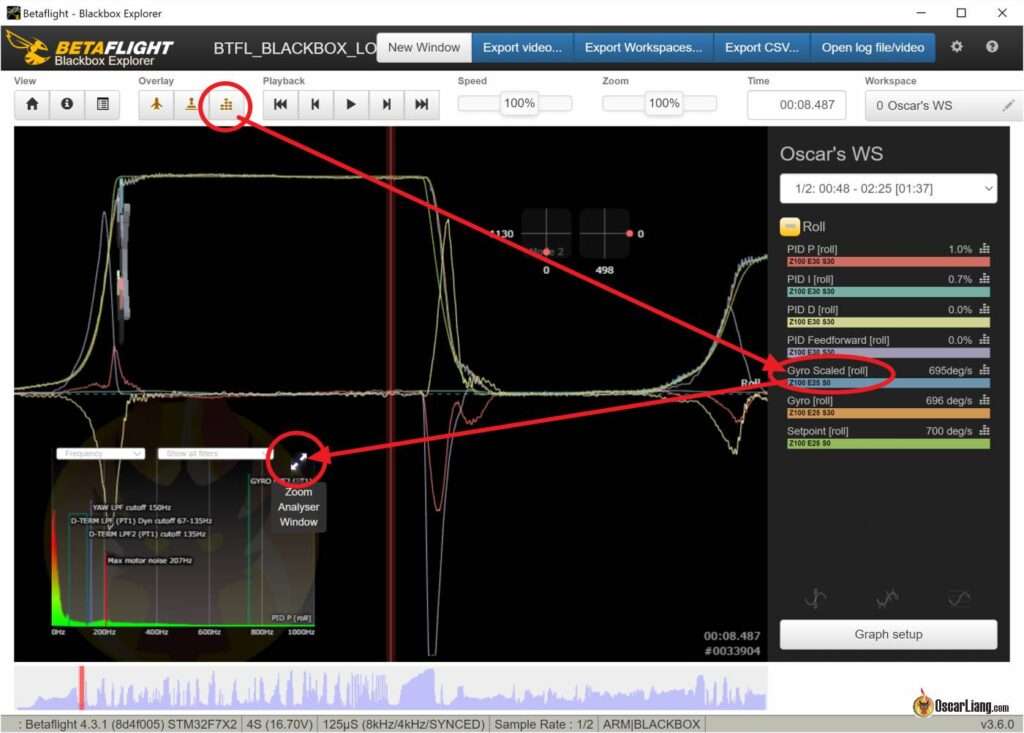
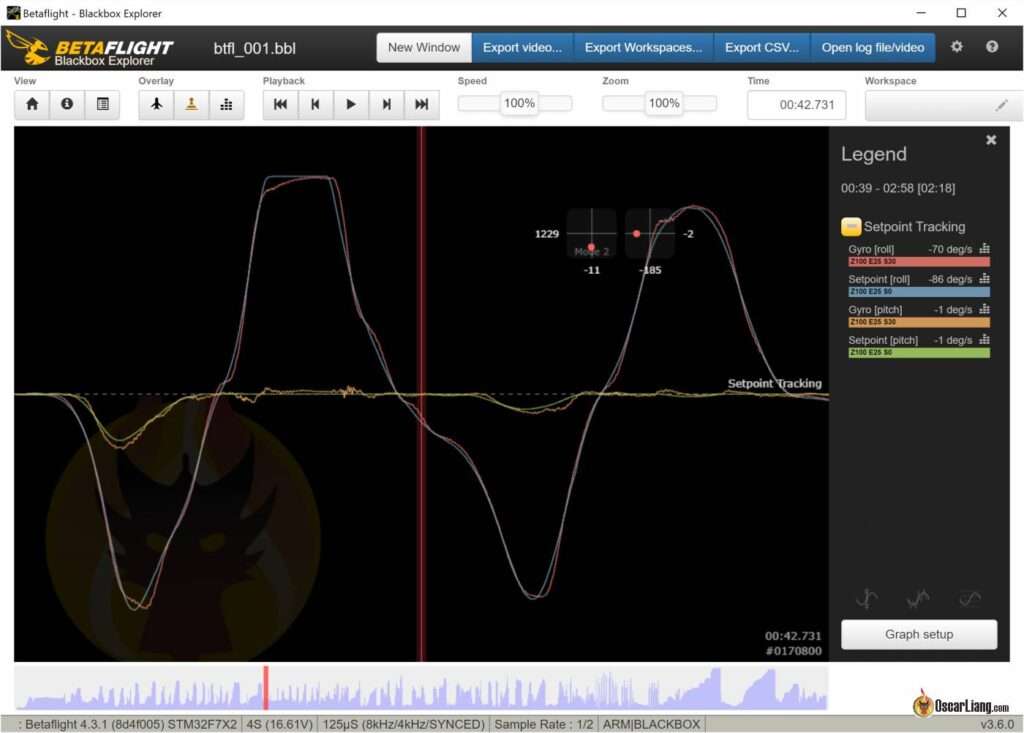
Blackbox Explorer 日志分析界面 — 飞行数据深度解读
33.1 黑盒记录系统
黑盒(Blackbox)是Betaflight的强大调试工具,记录飞行过程中的详细数据。这些数据可以用于事后分析,诊断飞行问题或优化飞行性能。黑盒是调试神器。
黑盒数据可以存储在飞控的内部闪存或外接的SD卡中。SD卡提供更大的存储空间和更快的写入速度。SD卡更好。
33.2 启用黑盒记录
在Configurator的Blackbox页面可以启用黑盒记录。可以设置记录频率、记录哪些数据等参数。启用很简单。
注意:黑盒记录会占用一定的处理器资源,在某些情况下可能需要降低记录速率或关闭其他功能。注意资源。
33.3 黑盒数据分析
黑盒数据需要使用专门的分析软件来查看,如Betaflight Blackbox Tools或flight Analyzer。分析需要工具。
分析黑盒数据可以了解:PID控制输出是否存在异常;陀螺仪数据是否包含过多噪声;滤波器是否正常工作;电池消耗情况;飞行轨迹和姿态变化。多方面分析。
33.4 常见黑盒分析指标
RC命令:飞手的输入信号。输入数据。
电机输出:实际发送给电机的控制量。输出数据。
陀螺仪数据:传感器原始数据。原始数据。
姿态误差:期望姿态与实际姿态的差值。误差数据。
PID输出:各PID环节的输出值。PID数据。
第三十四章:硬件故障排查

硬件故障排查流程图 — 电源/连接/传感器/电机逐步检查
34.1 飞控故障
无法开机:检查电源连接、稳压电路、焊接质量。电源检查。
USB无法识别:可能是USB接口损坏或驱动问题。USB检查。
传感器异常:尝试重新校准或检查硬件连接。传感器检查。
过热:检查是否存在短路或过载。过热检查。
34.2 传感器故障
陀螺仪异常:检查陀螺仪芯片是否损坏,尝试重新校准。陀螺仪检查。
加速度计异常:校准加速度计,检查是否存在物理损坏。加速度计检查。
气压计不工作:检查气压计芯片,尝试重新校准。气压计检查。
GPS不定位:检查GPS天线和模块。GPS检查。
34.3 通信接口故障
UART无法通信:检查TX/RX连接是否正确。UART检查。
I2C设备不识别:检查设备地址和接线。I2C检查。
SPI设备异常:检查SPI设备连接和配置。SPI检查。
34.4 电机/电调问题
电机不转:检查PWM信号、电调设置、电机连接。电机检查。
电机异响:可能是电机轴承损坏或螺旋桨问题。异响检查。
电调发热:检查电调是否匹配电机功率,检查接线。发热检查。
第三十五章:Betaflight进阶技巧
Betaflight Rates Expo曲线图 — 进阶调参与控感优化
35.1 高级PID技术
除了基本的PID参数调整外,Betaflight还提供了许多高级功能来进一步优化飞行表现。高级功能提升性能。
Anti-Gravity(反重力):当油门快速变化时,反重力功能自动增加I值,帮助稳定姿态。反重力在油门突变时保持稳定。
Throttle Boost:油门加速功能,可以在推动油门时获得更直接的响应。Throttle boost提升响应。
Acro Trainer:在Acro模式下提供角度限制,帮助初学者学习。Acro trainer是学习工具。
35.2 高级滤波器技术
Notch滤波器:针对特定频率的陷波滤波器,可以精确消除特定频率的振动。Notch精确滤波。
动态低通滤波器:根据飞行状态自动调整滤波器参数。动态LPT自动调整。
过滤器链优化:合理安排过滤器顺序可以获得更好的滤波效果。顺序影响效果。
35.3 高级调参技巧
Blackbox调参:使用黑盒数据分析PID输出的细节,优化参数设置。黑盒分析深入。
飞行风格匹配:根据飞行风格(竞速、Freestyle、航拍)调整参数。风格匹配重要。
多轴独立调参:为Roll、Pitch、Yaw轴分别设置不同的PID参数。多轴独立优化。
35.4 性能优化
CPU使用率优化:降低不必要的功能,简化滤波器设置,减少CPU负担。优化CPU使用。
延迟优化:减少输入延迟(RC延迟)和控制延迟(控制循环延迟)。优化延迟响应。
内存优化:合理配置黑盒记录,避免内存溢出。优化内存使用。
第三十六章:术语表
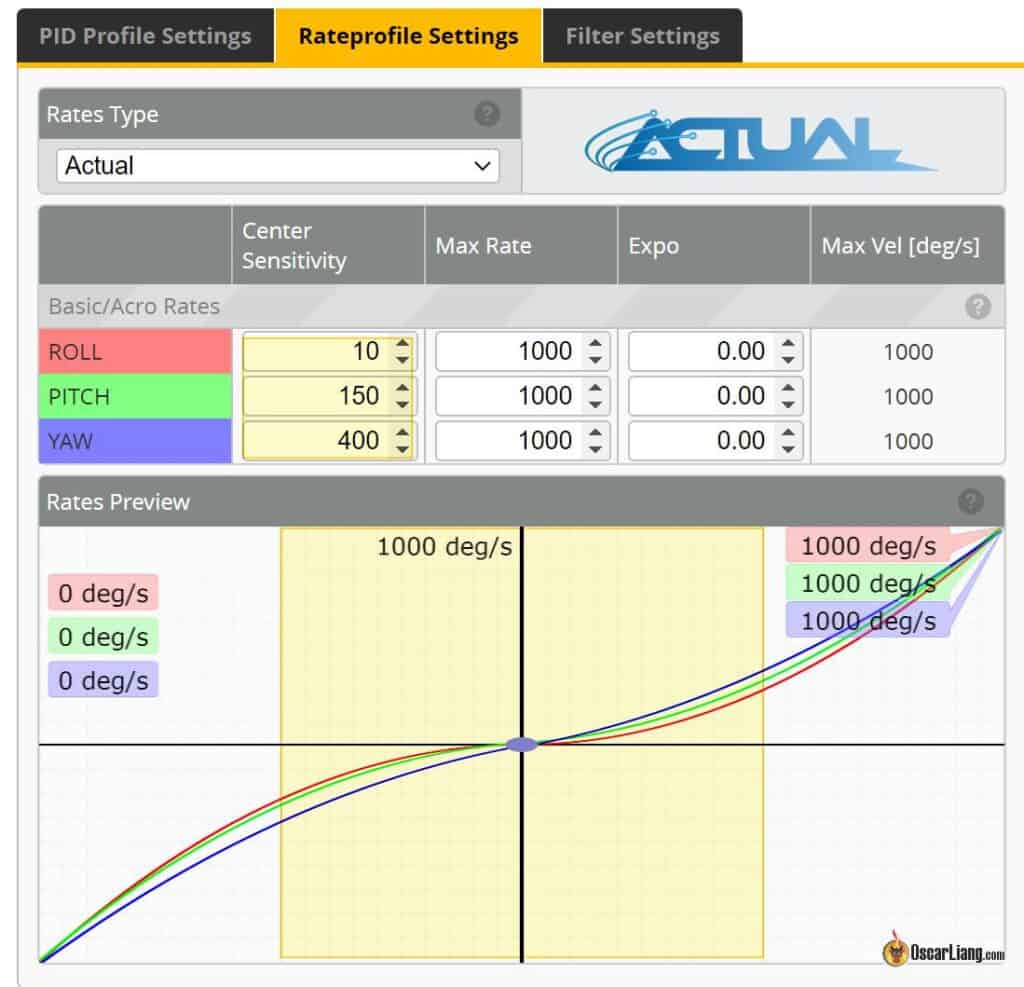
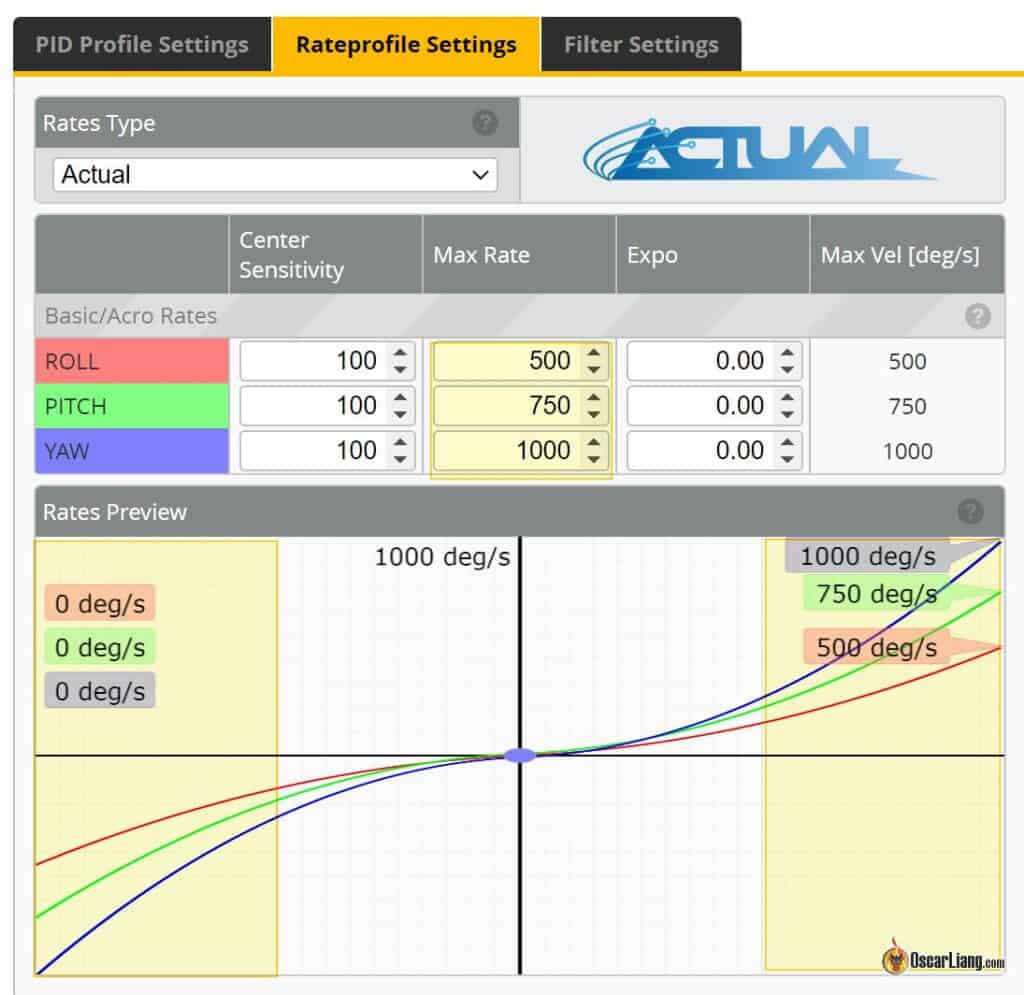
Betaflight Rate 参数术语图解 — Center Sensitivity / Expo / Max Rate
以下是本报告中涉及的主要术语解释:
| 术语 | 英文 | 解释 |
|---|---|---|
| 飞控 | Flight Controller | 无人机的核心控制单元 |
| PID | Proportional-Integral-Derivative | 比例-积分-微分控制器 |
| 陀螺仪 | Gyroscope | 测量角速度的传感器 |
| 加速度计 | Accelerometer | 测量加速度的传感器 |
| 磁力计 | Magnetometer | 测量磁场方向的传感器(罗盘) |
| 气压计 | Barometer | 测量气压高度的传感器 |
| PWM | Pulse Width Modulation | 脉冲宽度调制信号 |
| DShot | Digital Shot | 数字电机控制协议 |
| OSD | On-Screen Display | 屏幕显示系统 |
| RPM | Revolutions Per Minute | 每分钟转速 |
| FF | Feed Forward | 前馈控制 |
| CLI | Command Line Interface | 命令行接口 |
| UART | Universal Asynchronous Receiver/Transmitter | 通用异步收发传输器 |
| I2C | Inter-Integrated Circuit | 集成电路总线 |
| SPI | Serial Peripheral Interface | 串行外设接口 |
| ELRS | ExpressLRS | 高性能开源遥控协议 |
| VTX | Video Transmitter | 视频发射机 |
| BB响 | Beeper | 蜂鸣器警告装置 |
| 失控保护 | Failsafe | 信号丢失时的保护机制 |
| 黑盒 | Blackbox | 飞行数据记录系统 |
| 电调 | ESC | 电子调速器 |
| FPV | First Person View | 第一人称视角 |
| Freestyle | Freestyle | 自由飞行 |
第三十七章:参考资源
Betaflight OSD字体管理工具 — 社区资源与第三方工具示例
37.1 官方资源
Betaflight官网:https://betaflight.com/ - 官方主站
Betaflight GitHub:https://github.com/betaflight/betaflight - 源代码仓库
Betaflight Configurator下载:https://github.com/betaflight/betaflight-configurator/releases - 配置工具下载
37.2 文档和教程
Betaflight官方文档:https://betaflight.com/docs/ - 官方文档
Betaflight论坛:https://betaflight.com/forum/ - 官方论坛
官方配置指南:Configurator内置的帮助文档 - 内置帮助
37.3 社区资源
Betaflight Discord:官方Discord服务器 - 实时帮助
Oscar Liang的博客:知名的FPV技术博客 - 大量教程
Joshua Bardwell的YouTube频道:专业的FPV教学视频 - 视频教程
37.4 工具和软件
Betaflight Blackbox Explorer:黑盒数据分析工具
Betaflight PID Tool:在线PID调整工具
ESCs BLHeli Suite:电调配置软件
37.5 相关项目
INAV:自主飞行飞控固件
EmuFlight:另一个竞速飞控固件
Cleanflight:Betaflight的前身项目
ExpressLRS:高性能开源遥控系统