STM32F405 飞控悬停原理
从传感器到电机 · 四旋翼悬停的完整技术解析
一、悬停的本质 闭环控制如何维持固定位置和高度
悬停,是四旋翼飞行器最基础也最关键的状态——飞行器在无外部遥控杆量输入时,依靠自身控制系统维持在一个固定的三维空间位置(经度、纬度、高度)且姿态角为零(水平)的稳定平衡状态。这本质上是一个多变量、强耦合、快时变的闭环反馈控制问题。
整个悬停控制链可以分解为四个紧密衔接的环节:传感测量——多组传感器实时采集飞行器的角速度、加速度、气压高度和地磁方向;状态解算——通过互补滤波或卡尔曼滤波将传感器原始数据融合为稳定的姿态角(Roll、Pitch、Yaw)和高度估计;PID 控制计算——将期望值(悬停时所有期望均为零或锁定值)与当前估计值之间的偏差送入 PID 控制器,计算出各轴所需的修正力矩;电机输出——将 PID 输出通过混控矩阵映射到四个电机的 PWM 或 DShot 占空比,驱动电机产生差速拉力,最终使飞行器回到平衡位置。这四个环节以 1kHz 至 8kHz 的频率不断循环,构成一个高速数字伺服系统。
悬停的物理实质是重力与四个螺旋桨总拉力在垂直方向上的平衡,同时各轴力矩为零。任何外部扰动(阵风、重心偏移、桨效差异)都会打破这一平衡,而飞控的任务就是在数毫秒内感知并纠正这种偏离。
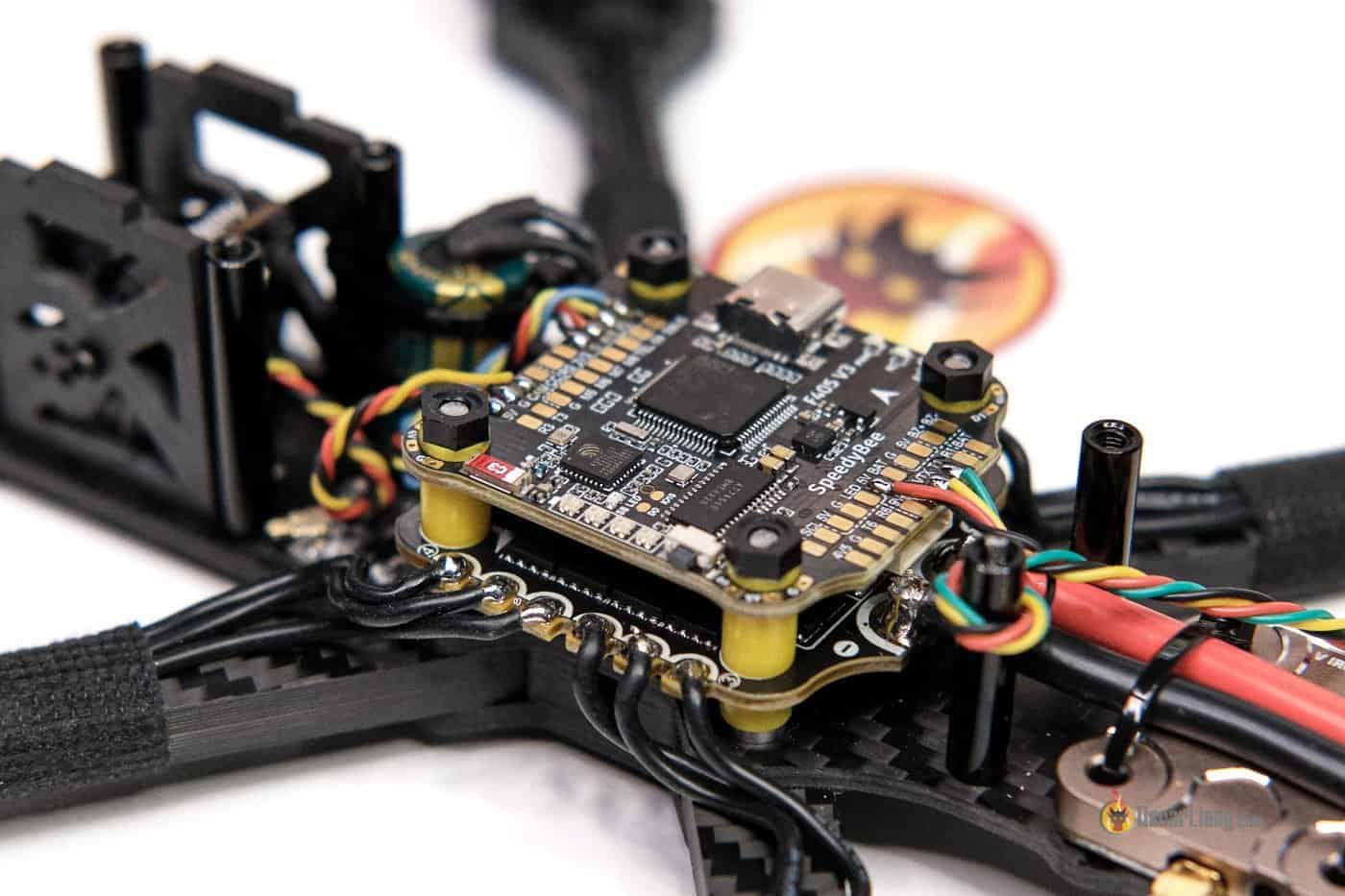
二、STM32F405 硬件核心 为什么它是飞控领域的经典之选
STM32F405 基于 ARM Cortex-M4 内核,带单精度浮点运算单元(FPU),主频高达 168MHz。与 Crotex-M3 相比,DSP 扩展指令集和硬件 FPU 使其能够在一个时钟周期内完成浮点乘加运算,这对姿态解算中大量的矩阵运算和卡尔曼滤波至关重要。


在飞控选型中,STM32F405 之所以成为跨越多个时代的主流方案,原因在于它恰到好处地平衡了性能、功耗、成本和生态。其 192KB SRAM 足以容纳完整的姿态卡尔曼滤波器状态向量和 PID 控制参数表;12 个独立定时器可轻松驱动 8 路 PWM 输出并捕获多路遥控器信号;三个 SPI 接口可同时挂载陀螺仪、加速度计、气压计和磁力计而无需时分复用。内存方面,1MB Flash 可存储完整的 RTOS(如 FreeRTOS)、驱动程序、姿态解算库以及数种飞控固件(BetaFlight、iNav、ArduPilot 等)的核心逻辑。此外,STM32F405 集成的温度传感器和电压监测功能还为飞控提供了硬件层面的健康监控能力。
BetaFlight 固件支持 开源飞控生态的绝对主力
STM32F405 是 BetaFlight 固件支持最完善的芯片平台之一。基于 F405 的经典飞控板(SpeedyBee F405 V3/V4、Matek F405-WING/CTR、Holybro Kakute F4 等)在 BF 的 target 列表中拥有完整的配置文件。F405 的硬件资源恰好覆盖了 BetaFlight 全部核心功能的需求:1MB Flash 足以容纳 BF 固件(约 500-700KB)和完整的配置参数表;192KB SRAM 为 Blackbox 日志缓冲、OSD 字体缓存和实时调参数据提供了充足空间;三个 SPI 总线可同时驱动 ICM42688-P 或 ICM20689 陀螺仪和气压计;充足的 GPIO 引脚可接满 UART(SBUS/CRSF 接收机)、I2C(磁力计/气压计扩展)、LED 灯带和蜂鸣器。
BetaFlight 在 F405 上可启用的完整功能清单包括:串级 PID 控制(4kHz/8kHz Gyro/PID 循环)、DShot150/300/600/1200 数字电机协议、Blackbox 飞行日志记录(内置 Flash 或 SD 卡)、OSD(MAX7456 芯片驱动,实时叠加飞行数据到 FPV 画面)、动态滤波器(RPM 滤波 + Dynamic Notch Filter,自动抑制电机共振频率)、双向 DShot 遥测(实时读取电机电流、温度和转速)、以及通过 BF Configurator 进行的 USB 在线调参。悬停所需的 PID 参数、滤波器设置、电机混控矩阵均可在 BF Configurator 中通过图形界面完成配置,无需编写任何代码。
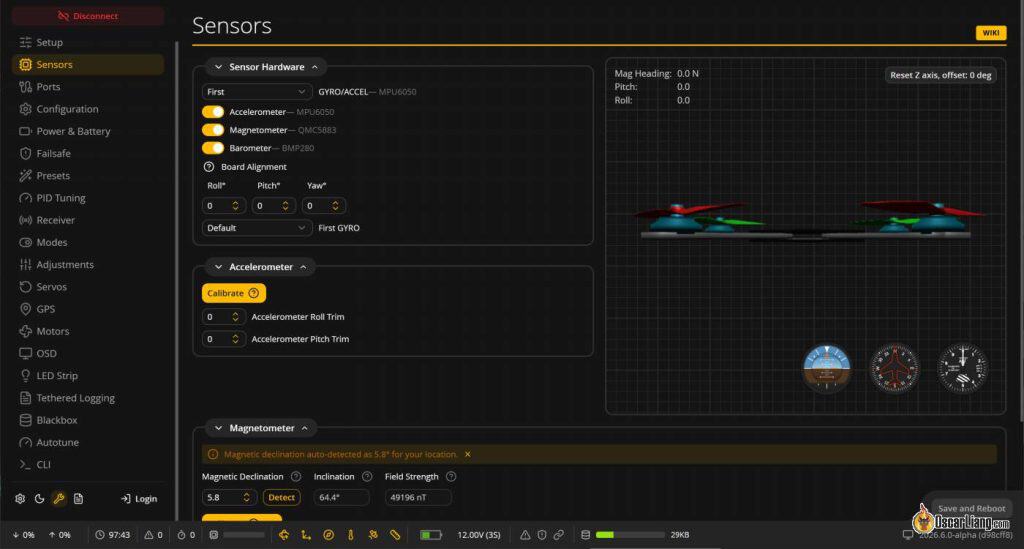
四、传感器融合 多源数据的有机统一
单靠一个传感器无法获得可靠的姿态估计。陀螺仪(通常为 MPU6000 或 ICM20689)测量角速度,短期精度极高但存在零偏漂移,积分得到的角度会随时间发散;加速度计测量重力矢量方向,可提供绝对 Roll 和 Pitch 角度参考,但机体水平加速时会产生严重干扰;磁力计提供 Yaw 方向的绝对参考,但易受到电机磁场干扰;气压计提供高度信息,但对气流和温度敏感。这些传感器的特性互补,但单独使用都存在不可克服的缺陷。
传感器融合算法的核心思想是"取长补短":在短时间尺度上信任陀螺仪的角速度积分结果,在长时间尺度上用加速度计和磁力计对积分结果进行修正。互补滤波(Complementary Filter)采用最简单的权重分配方式——角速度积分通过高通,加速度和磁力通过低通,相加得到最终姿态。虽然计算量极小,但在强机动或高频振动环境下精度不足。卡尔曼滤波(Kalman Filter)则通过状态预测和测量更新的递归框架,建立包含陀螺零偏在内的系统模型,以最优估计理论融合多传感器数据。标准卡尔曼滤波假设线性系统和高斯噪声,而实际的四旋翼运动模型是非线性的,因此工程中常采用扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF),在飞控每一主循环中执行预测和更新两步,输出最稳定的姿态角估计值。
五、定高悬停 气压计 + 超声波 + GPS 的高度锁定
定高悬停与普通悬停的本质区别。普通悬停中飞行员需手动控制油门维持高度,而定高悬停(Altitude Hold / Alt Hold)模式下,飞控通过高度传感器持续测量飞行器相对于地面的垂直距离,自动调节总油门(Throttle)来维持目标高度不变。当飞行器受到上升气流或重力变化影响时,飞控在数毫秒内检测到高度偏差并自动补偿油门量,飞行员只需控制 Roll/Pitch/Yaw 即可,油门杆量被飞控接管。
高度传感器的选择与融合。气压计是定高的核心传感器——BMP280 理论分辨率 0.16m(实际有效精度约 ±0.5m),BMP388 提升至 ±0.15m。气压计通过测量大气压力反算海拔高度,但存在严重的环境干扰:机身螺旋桨产生的下洗气流会在传感器附近形成局部低压区,导致气压读数瞬时偏低(飞行器误判自己升高而减小油门),因此气压计必须安装在远离螺旋桨气流的 PCBA 位置,并在硬件上覆盖防风棉。在 1-3m 低空范围内,超声波传感器(如 MB1240)或 ToF 激光传感器提供更精确的绝对高度测量(精度 ±1cm),且不受气压波动影响。室外悬停场景下,GPS 的垂直定位信息(精度 ±1-3m)可作为长时间尺度的漂移校正参考。三种传感器通过卡尔曼滤波融合,短时使用气压计的相对变化率,长时用 GPS 修正气压漂移,低空时用超声波接管。
高度控制采用典型的串级 PID 结构。外环为高度环(Altitude Loop),输入为期望高度与实际高度之差,输出为期望爬升速度(单位 m/s)。内环为爬升速度环(Climb Rate Loop),输入为期望爬升速度与实际爬升速度(气压计微分或加速度计积分得到)之差,输出为油门修正量(Throttle Correction)。外环的 P 增益决定了飞行器对高度偏差的响应强度——P 过大时飞行器会在目标高度上下反复振荡,P 过小时飞行器缓慢爬升迟迟无法到达目标。内环的 I 增益用于补偿悬停油门的稳态偏差——当电池电压下降导致总推力降低时,I 项自动增加油门以维持相同爬升率。D 项则抑制爬升速度变化过快引起的超调。
定高悬停在 BetaFlight 中的实现路径。从 BetaFlight 4.3 版本开始,Alt Hold 模式正式纳入 F4 级别飞控的功能列表。在 BF Configurator 的 Modes 选项卡中,可将 Aux 通道映射为 ARM + ALT HOLD 模式开关,遥控器上指定一个三段开关即可在手动油门和定高模式之间切换。启用 Alt Hold 的前提条件包括:在 Configuration 页面启用 BARO(气压计),确认传感器数据在 Receiver 选项卡中正常刷新,以及在 PID Tuning 页面中的 ALT(高度环)和 VEL(速度环)参数组进行合理配置。首次启用建议将 ALT P 设为 50、ALT I 设为 0、ALT D 设为 0,VEL P 设为 80、VEL I 设为 20、VEL D 设为 10,在室内低空(1m 左右)逐步调高 ALT P 直到出现轻微振荡后回退 20%。
六、PID 控制回路 Roll / Pitch / Yaw / Throttle 四通道独立调节
PID 控制器是悬停控制的核心算法。四旋翼飞行器有四个独立控制通道:横滚(Roll)、俯仰(Pitch)、偏航(Yaw)和总油门(Throttle)。在悬停状态下,Roll、Pitch、Yaw 的期望值为零(水平且机头方向锁定),Throttle 的期望值对应悬停油门(约为总推力的 50%)。实际控制采用串级 PID(Cascaded PID)结构,外环为角度环,内环为角速度环,内环频率通常是外环的 3-5 倍。
P 项(比例项)直接响应当前偏差——姿态角偏离期望值越大,P 输出的修正力矩越大。P 增益决定了系统的刚度,P 过小则飞行器"软"、受扰动后回正缓慢;P 过大则会引起震荡甚至失控。I 项(积分项)累积历史偏差,专门用于消除稳态误差——例如重心偏移导致飞机始终朝某一侧倾斜时,I 项会逐步增加修正量直到偏差归零。但积分项也是双刃剑,积分饱和(Integral Windup)是飞控中最常见的问题之一,当执行器饱和(如已达到最大油门)时积分继续累积,导致恢复后出现大幅超调。D 项(微分项)根据偏差变化率提供阻尼——当姿态快速靠近期望值时,D 项产生反向阻尼力矩,抑制过冲和震荡。D 项对高频噪声极其敏感,测量噪声会被放大为剧烈的电机抖动,因此必须对微分输入信号进行低通滤波。
在实际调参中,常用的经验顺序为:先调高内环 P 使角速度响应迅速且不震荡,再逐步加入 D 增加阻尼,最后引入外环 P 和 I 锁定角度。四种机架类型(X 型四旋翼、H 型、Y3 等)和不同尺寸的螺旋桨会显著影响 PID 参数的合理范围。
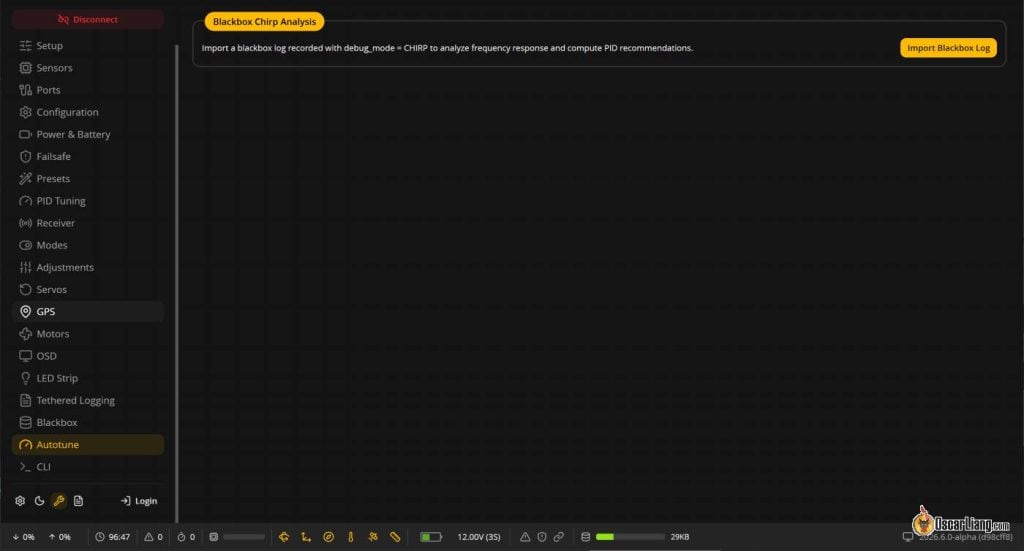
七、PID 响应曲线 P / I / D 贡献的可视化
八、电机混控与输出 从 PID 计算值到螺旋桨转速
PID 控制器计算出的是 Roll、Pitch、Yaw、Throttle 四个虚拟轴的控制量,而物理执行器是四个独立的电机。混控矩阵(Mixer Matrix)负责将这个四维控制向量映射到四个电机的输出值。以最常见的 X 型四旋翼为例:前方两个电机分别标注为 M1(右前,逆时针)和 M2(左前,顺时针),后方两个为 M3(右后,顺时针)和 M4(左后,逆时针)。Roll 控制通过增大一侧电机转速同时减小另一侧来实现;Pitch 控制通过调节前后电机差速实现;Yaw 控制利用反扭矩作用——顺时针和逆时针电机的反扭矩差产生偏航力矩。
输出协议方面,传统的 PWM 信号(50Hz-490Hz)由于分辨率有限且存在刷新率瓶颈,在高端飞控中正逐步被 DShot 数字协议取代。DShot 使用单向数字信号直接传输 11 位油门值,无需校准,刷新率可达 8kHz 甚至 32kHz,显著降低响应延迟和抖动。STM32F405 的 DMA 定时器输出可在几乎不占用 CPU 的情况下产生多达 8 路 DShot 信号流。
九、软件主循环 1kHz 控制律的精确时序
BetaFlight 等主流开源飞控固件的主循环通常运行在 1kHz(每毫秒一次)。每个主循环内依次执行传感器数据读取、姿态解算、PID 控制计算和电机输出。在 STM32F405 上,一次完整的主循环约消耗 200-300μs(取决于滤波器阶数和传感器数量),留有超过 70% 的 CPU 余量用于遥测、GPS 解算等辅助任务。更激进的高速飞控可以将 PID 速率提升至 4kHz 甚至 8kHz,此时每一个循环时间被压缩到 125μs,需要精细优化代码和利用 FPU 硬件加速。
十、关键难点 工程中的真实挑战与应对
尽管控制理论框架看起来清晰规整,在真实硬件上实现稳定悬停仍面临若干工程难题。陀螺仪噪声滤波是第一关。消费级 MEMS 陀螺仪在静止时输出噪声幅度可达 0.05 °/s/√Hz,而四旋翼机架的电机振动(主要频率为桨频及其倍频,典型值 50-300Hz)会通过 PCB 和减震海绵耦合到传感器,产生大幅度振动噪声。降采样、滑动平均滤波、以及更高阶的 FIR/IIR 低通滤波器(如 2 阶 Butterworth,截止频率 40-80Hz)是常用的预处理手段,但滤波会引入相位延迟——过度滤波反而会降低控制回路的相位裕度,导致系统不稳定。工程中需要在噪声抑制和信号延迟之间精细权衡。
积分饱和防护(Anti-Windup)是 PID 实现中极易被忽视但后果严重的问题。当电机输出达到物理极限(油门 0% 或 100%)时,误差仍然存在,积分项继续累积,一旦脱离饱和区,过大的积分值会导致系统大幅超调和剧烈振荡。常用的解决方案包括:条件积分(只在输出未饱和时进行积分)、积分限幅(限制积分项最大值)、以及反馈反算(Back-Calculation),当检测到饱和时将积分累加量回退。
D 项微分噪声处理是另一个实践中的核心痛点。理想的微分器传输函数在频率域随频率线性增益放大,这意味着传感器噪声中的高频成分会被微分项急剧放大,反映在电机输出上就是高频抖动,加剧电机发热和效率损失。因此几乎所有飞控实现中都会对微分项施加低通滤波——在 BetaFlight 中称为 D 项低通滤波器(D-term LPF1/LPF2),默认截止频率通常在 50-120Hz 之间,且需要根据机架刚性和螺旋桨尺寸进行调节。一些高级飞控还引入了动态 D 项衰减(Dynamic Damping),在检测到高频振荡时自动降低 D 增益以抑制共振。
最后,传感器温漂校准和减震机械设计同样是影响悬停品质的重要因素。陀螺仪和加速度计的零偏通常会随温度呈非线性漂移,高品质飞控会包含温度补偿模型。而物理减震设计(减震 O 圈、泡沫胶垫、分离式传感器板)则从源头上减少振动向传感器的传递,这是任何滤波器都无法完全替代的。
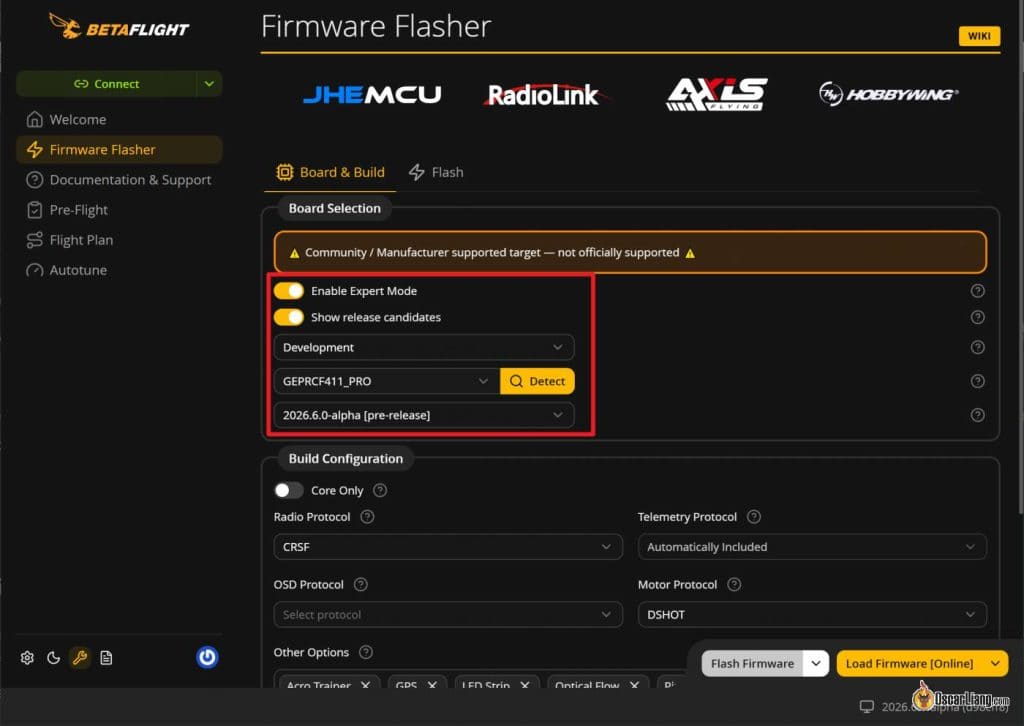
十一、实战参考 从固件刷写到首次悬停
将一块裸飞控板变成能悬停的四旋翼,需要经过固件刷写、传感器校准、接收机配置、PID 初调四个关键步骤。在 Betaflight Configurator 中,连接飞控后首先在 Firmware Flasher 页面选择对应 target(如 SPEEDYBEEF405V4),点击刷入最新固件。刷写完成后进入设置向导,依次完成陀螺仪校准(水平放置飞控,点击 Calibrate Accelerometer)、遥控器通道映射(确认 Roll/Pitch/Yaw/Throttle 方向正确)、以及电机方向测试(在 Motors 页面逐个确认旋转方向)。首次悬停建议在柔软草地上方 0.5m 高度进行,油门缓慢推至悬停点,观察飞行器是否自然水平——如果持续向一侧倾斜,说明需要微调加速度计校准或检查重心位置。
PID 初调建议从保守参数开始:Roll P=40, I=30, D=20;Pitch P=40, I=30, D=20;Yaw P=45, I=30, D=0。如果悬停时出现低频摆动,逐步增大 P;如果出现高频抖动,增大 D 或降低 D-term LPF 截止频率;如果悬停时有缓慢漂移,适当增加 I。每次只调一个参数,调整幅度不超过 5。调参完成后建议开启 Blackbox 记录一次悬停飞行,回放日志验证各通道响应曲线是否平滑收敛。